大型分布式C++框架《三:序列化与反序列化》
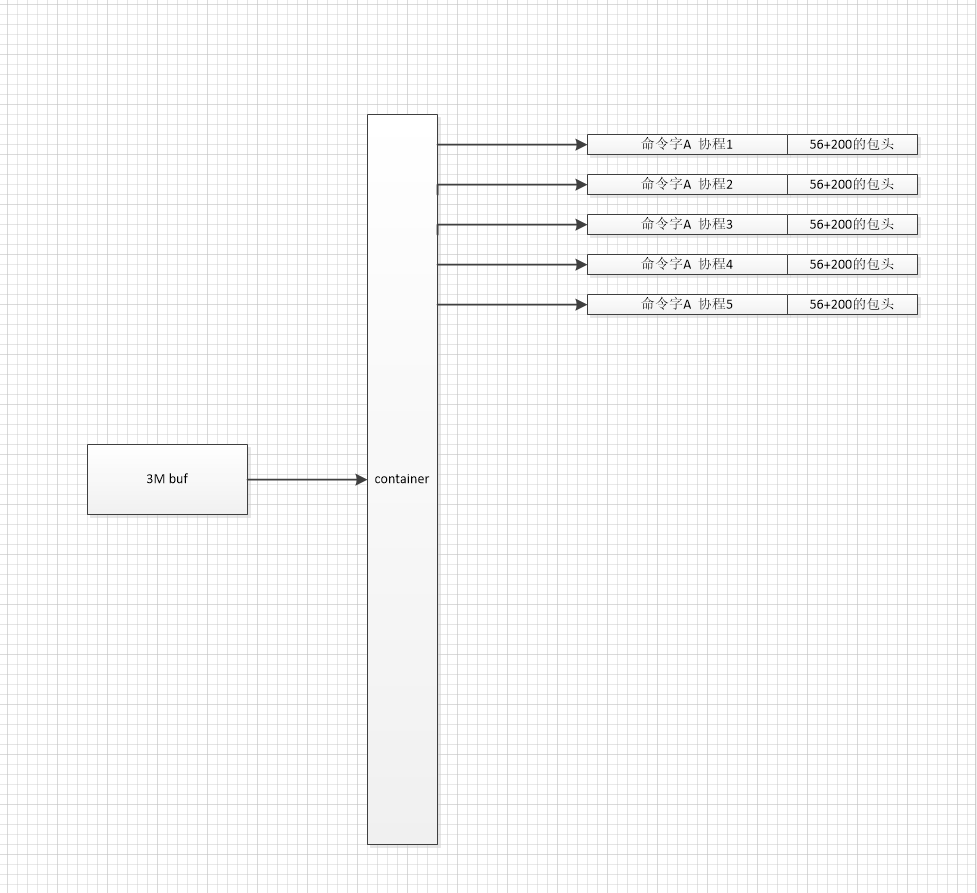
一、前言 个人感觉序列化简单来说就是按一定规则组包。反序列化就是按组包时的规则来接包。正常来说。序列化不会很难。不会很复杂。因为过于复杂的序列化协议会导致较长的解析时间,这可能会使得序列化和反序列化阶段成为整个系统的瓶颈。就像压缩文件、解压文件,会占用大量cpu时间。 所以正常的序列化会在时间和空间上考虑。个人感觉对于电商业务时间应该是相对重要些。毕竟用户没有那么多时间等你解析。 我们是用thrift来序列化的。一份thrift文件生成2份。一份是c++生成的用来编写服务接口。一份是php生成的。所有请求都会先落到前端机器。然后前端机器用php调用服务端函数接口。返回处理结果。这其实是远程调用rpc。 二、分配序列化空间的大小 说序列化之前先说下平台给序列化分配的buf的空间大小 1、每个协程会分配大概固定包头(56个字节)+特殊buf(200个字节)的空间来保存包头。所以首先如果收到的包特殊buf(就是放sessionkey和uid等信息)大于200个字节。会报错不处理。但是并不会给netio 返回一个错误包消息。所以客户端 会一直等到客户端设置的超时时间 2、每个container会分配3M的空间来处理数据。所以去掉包头和特殊buf.剩下的就是可以用来序列化的空间 3*1024*1024-固定包头-特殊buf。 所以最少会有3*1024*1024-56-200的空间 这里其实可以看到协程的好处。这个3M的空间。对于每个协程来说是共享的。因为我们是协程的方式,其实是一种顺序流程,没有协程会跟你竞争使用这个buf的资源。因为可以自己手动控制协程的切换。 如果是多线程的话。可能就要对这个buf加锁。竞争这一个全局资源来处理数据。这也是多线程编程被诟病的一个地方,需要加锁。 三、序列化步骤 1、我们先看下请求。 oCntlInfo.setOperatorUin(10458); oCntlInfo.setOperatorKey("abcde"); oCntlInfo.setRouteKey(1234); std::string source = "aaaaa"; std::string inReserve; std::string errmsg; std::string outStr; std::string machineKey; for(int i =0;i<500*1024;i++) { machineKey.append("a"); } AoActionInfo oActionInfo; oActionInfo.SetDisShopId(1111); oActionInfo.SetDistributorId(2222); uint32_t dwResult = Stub4App.AddActionSupplier( oCntlInfo, machineKey, source, 1, 1, oActionInfo, inReserve, errmsg, outStr); if(dwResult == 0) { std::cout << "Invoke OK!" << std::endl; std::cout << "Invoke OK!" << std::endl; } 客户端直接调用函数接口。到服务端请求结果 最后需要序列化的东西如下是类_Cao_action_AddActionSupplier_Req 函数的入参都是我们需要序列化的内容。注意这里是rpc调用的一个关键点。 2、序列化开始 a) 先看下我们的thritf 如果下图。发现我们的函数入参也是打上了tag标志的。作用跟我们在结构体中打tag标志是一样的。为了标识一个字段的含义。 序列化的时候把这些tag序列化进去。 然后反序列化的时候靠这些tag来解析 b ) 先把图贴出来。按着图来讲更清晰些 c) 首先我们会创建一个CByteStream的类来。序列化内容。在CByteStream的构造函数会自动写入一个字节的序列化包头。值为1 CByteStream(char*pStreamBuf=NULL,uint32_tnBufLen=0,boolbStore=true,boolbRealWrite=true); pStreamBuf 是序列化buf指针 pStreamBuf 是序列化的长度 bStore true表示是否需要包数据存储下来。 false表示不需要把数据存下来 bRealWrite 表示是否支持读写buf d) 接着就开始写类_Cao_action_AddActionSupplier_Req的成员变量。其实就是函数入参。写的时候是先协tag就是下图中的fid。 其实就是在thrift中已经写好的函数入参的tag值。 具体写的过程我们先看简单基本类型。比如strMachineKey 1)先写tag。 strMachineKey 的tag为1. 程序里规定tag占两个字节。所以函数入参可以是0xffff个。 2 ) 接着会写4个固定的字节。用来存储后面紧跟着数据的值。这里strMachineKey的长度是512000. 3 ) 写内容 。 把strMachineKey的内容写入紧跟着的buf 针对整形和长整形就不说了 大同小异 e) 接着我们关注下 是怎么写结构体oActionInfo的。 1)先写tag。 oActionInfo 的tag为5. 程序里规定tag占两个字节。 2 ) 接着针对结构体这里 会写4个固定的字节用来存结构体序列化长度。因为开始不知道所以值为0。 3 ) 接着写字段 DistributorId。 它在oActionInfo结构体中的tag值为6.类型为int64. 所以先写tag=6占两个字节,接着分配4个字节存长度。最后分配8个字节存内容 4)跟着写DisShopId字段。就不细说了 5)最后写了2个字节包尾 6)最后 回写结构体的长度 这里注意下写结构体时候的写法。不注意的话会看错。 1)这里先拿到开始写结构体的buf指针。注意这里是用的int32_t。占四个字节。跟前面保持一直。这里用来的存后面总序列虚化结构体提的总长度。 2)由于刚开始的时候 并不知道后面的结构体会序列化多少个字节。所以这里先写4个字节。 同时把这便宜的4个字节的内存值 设置为0 bs<<0; (这里其实建议写成 bs<<int32_t(0) 会好一点。开起来一致) 这里开始没注意。以为写4个字节值为0的结构体的头。其实这里是放结构体长度的 3)最后第5步。 重新赋值 结构体的长度 1)int32_t* pLen = (int32_t*)bs.getRawBufCur(); 2)bs << 0; 3)int32_t iLen=bs.getWrittenLength(); 4)Serialize_w(bs); 5)*pLen = bs.getWrittenLength() - iLen; f)最后对整个_Cao_action_AddActionSupplier_Req写了两个字节的包尾 g) 我么可以看到oActionInfo其实有一堆的字段。但是我们在请求的时候只写了两个字段。所有在序列化的时候也只序列化了两个字段 其实我们可以看到我们的这种序列化,很整齐。很规则。比较紧凑。但是并不节省空间。这个里面有很多数据可以压缩的。但是压缩带来一个问题就是解压的时候很消耗cpu的。跟我的业务场景不服和。也没必要。 四、序列化解析 其实知道了数据是怎么写入的 解析起来就很容易了。其实这种序列化就是两边约定规则。知道规则以后就可以解析了 解析的具体步骤就不详细说了。这里说下解析的时候几个特殊的地方 1、因为tag占2个字节。所以函数入参不能大于0xffff. 一个结构体的字段个数不能大于0xffff 2、假如前端传入的tag在解析端找不到。解析端会偏移处理下一个tag。所以这是为什么我们可以删除字段的原因。 比如前端传入的结构如下 struct A{ 1:int aa 2:int bb } 但是服务端后台编译后删除了一个字段 struct A{ 1:int aa } a)如果前端只填了字段aa。 那么解析起来没有任何问题.因为不会把字段bb的任何信息序列化进去。 b)假如前端填了 aa 和 bb字段。 那么服务端在解析的时候。拿到tag2。发现找不到对应的数据。 那么它会偏移4个字节取tag2对应字段内容所占的字节数。比如这里是4. 接着它发现是4.就偏移4个字节。不处理字段值内容。直接取下一个tag进行处理 这也就是我们为什么能删除字段的原因。 这样看来我们的函数入参其实也是可以删除的 3、我们服务端新增字段重新编译。前端没有对应的tag。根本不会序列化进来。这也是我们可以增加字段的原因。 4、解析的时候如果发现tag为0.则会是认为解析结束。所以我们的tag是不能为0的 5、这样我们也就能为服务端函数增加入参的。 同一个函数比如前端的入参是4个。服务端可以增加N个. 但是注意不能占用 函数已经用的tag。否则会有问题。而且为了保证函数的统一性。最好别这么做。 6、到这里已经很清晰了。 最后再说一次不能改tag对应的类型。 五、话外 我们的这一套就是远程调用rpc服务。通过我们的序列化。 其实就能了解所谓的RPC服务是什么样的。 说白了,远程调用就是将对象名、函数名、参数等传递给远程服务器,服务器将处理结果返回给客户端。 为了能解析出这些信息。在入参的时候做上标识(这里是打tag). 谷歌的protobuf也用过。跟thrift其实差不多但是序列化和反序列的话的具体实现是有些不同的。 谷歌的protobuf更节省空间 以前具体看过序列化的源码。觉得序列化反序列化以及rpc很神秘。现在看了源码才发现确实写的确实好, 但是没那么神秘里。其实就是按一定规则组包。所以还是要多看源码啊。 我们用的thrift就是 facebook的thrift。但是改了些东西。大体是一样的。