中国信息通信研究院(简称“中国信通院”)联合清华大学电子工程系近日正式发布《具身智能发展报告(2025年)》。
报告聚焦过去一年来具身智能产业的新发展新变化新挑战,总结梳理国内外具身智能产业、技术、应用等方面的发展特点,聚焦“数据-模型-本体”三个关键环节,研判分析技术发展路径及问题,围绕机器人、智能运载装备和新型智能产品三大类产品,探讨具身智能产品发展情况及应用局限性,最终从技术架构重构、应用场景深化和安全伦理构建三方面对未来发展进行展望。
报告核心观点
1. 具身智能资本融资规模迅速扩大,但需要认识到,从技术突破到应用落地仍需要一定发展周期,商业化落地仍处于早期探索阶段。具身智能是2025年最火热的投融资赛道之一。截至2025年12月,我国具身智能和机器人领域投资事件数达744起,融资总额735.43亿元人民币。但需要认识到,具身智能从技术突破到应用落地仍需要一定发展周期。无论是模型实现路径、数据方案还是本体分类分级的应用落地途径,行业都未找到确定性答案,正在多路径、多场景探索。现阶段,以机器人为代表的具身智能产品走进训练场、行业场景中展开实训,但走向大规模应用前仍需进一步突破智能短板,跑通从定制化开发,整机规模化交付到二次开发运维的场景化落地闭环。
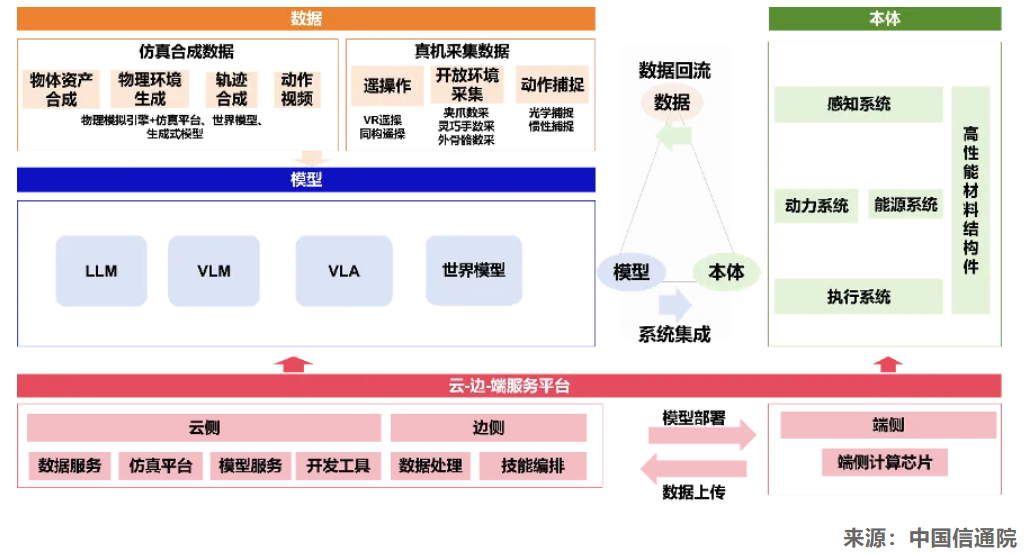
2. 数据驱动下开展软硬融合创新,围绕“数据-模型-本体”三个关键技术要素及支撑技术加快探索。具身智能有别于传统AI线性的“输入数据-输出答案”模式,需要在物理环境的交互中形成自主进化的智能闭环:本体被部署到真实场景中→在执行任务中收集真实行为数据→高质量数据被用于模型训练和迭代→更通用的模型被部署到更多的机器人上,从而收集更多、更高质量的数据。数据是闭环飞轮启动起点,具身智能在数据驱动下实现软硬融合创新,围绕“数据-模型-本体”三个关键技术要素展开多路径探索,云边端协同支撑系统研发和在现实环境中的有效运行。
3. 具身智能技术正在多路径探索迭代,围绕“通用大脑”和“技能可扩展学习”两大方向开展密集创新。具身智能技术路径整体可分为四条,包括模块化分层、分层大模型、端到端大模型和世界模型。其中,模块化分层路线聚焦机器人运动技能学习突破,其它三条路线旨在发展具身基础模型,构建一个通用大脑。2025年,一方面,围绕“大脑”的技术创新呈现爆炸式增长。具身基础模型从LLM和VLM的“大模型+”路线的感知、决策能力单点突破,向VLA、世界模型等“感知-认知-决策-执行”闭环能力演进。另一方面,小脑运控层面,仍在延续机器人学习路线,深入探索技能可扩展学习方法,支持本体在与环境交互过程中学习技能并持续精进。

4. 具身智能在场景驱动下的产品谱系不断丰富,多元化产品从生产作业到生活服务,从常规作业环境到上天入海涉险,加速细分场景拓展。我国超大市场规模为具身智能应用落地提供更多机会,多样化场景需求也催生了具身智能产品谱系的不断丰富。目前具身智能产品包括机器人、智能运载装备和新型智能产品三大类,以人形机器人、复合轮臂机器人(轮式底盘结合双臂)为代表的新兴具身智能产品以科研、训练场、娱乐表演或特定场景试点为主,部分产品在逐步推进行业场景的小规模应用。

5. 具身智能训练场建设成热点,实际效用仍需进一步验证。具身智能训练场(以下简称“训练场”)通过搭建应用场景、采集数据、训练模型和反馈迭代,帮助破解具身智能领域物理世界数据采集成本高,效率低下的核心瓶颈。据不完全统计,国内已建成或计划在建的训练场已接近30家,但训练场的实际效用仍有待进一步验证,距离真正解决产业问题仍面临多重挑战,包括训练场对场景深度不足、重复构建、跨训练场数据难以实现互通互用、训练场数据产品尚未形成可持续的商业模式等问题。
6. 具身智能现在尚未完全成熟,但作为走向通用人工智能的重要路径,随着技术和产业沿着科学的周期不断发展,具身智能也将真正融入生产生活。未来将重点聚焦于:一是技术架构重构,通过模型架构、多学科融合、学习范式、人机或多机协作模式等多层次融合创新,真正实现“感知—决策—行动”的全链路贯通。二是应用场景深化,在广泛而深入的场景探索下,有望应用在国民经济行业分类中的所有二十个门类和部分典型的垂直应用领域中实现深度发展,孕育形成数个万亿级的市场。三是安全伦理构建,把握具身智能“人-机-物”深度融合的关键特征,建立多维度、系统性的具身智能安全防护和治理体系。
