北京人形机器人创新中心(国家地方共建具身智能机器人创新中心)发文宣布,其团队研发的具身智能策略框架 FreqPolicy: Efficient Flow-based Visuomotor Policy via Frequency Consistency,成功入选人工智能领域顶级会议 NeurIPS。
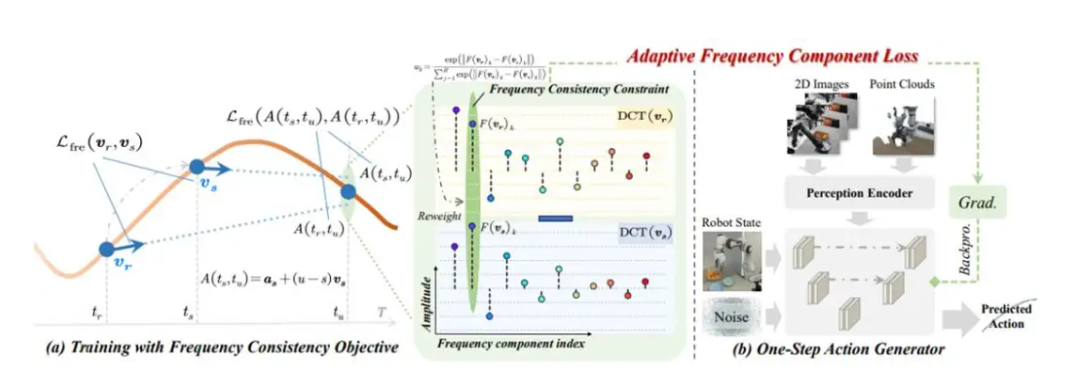
根据介绍,FreqPolicy 框架的核心创新在于:首次引入频谱一致性约束,从频域角度重构具身智能机器人动作的时间建模方式。通过在策略生成过程中引入时序信息的频域表达,FreqPolicy实现了“一步生成高效动作流”,显著提升了具身智能机器人操作的效率与连贯性。
在AI全面走向物理世界的背景下,该项工作面向高效具身操作进行研究,通过一步生成机制,大幅提升动作预测频率和控制频率,满足具身智能机器人系统对于高响应性场景的要求,适用于动态环境、自适应操作等高复杂度场景。
![]()
FreqPolicy 将动作块(action chunk)通过DCT-II变换映射到频域空间中进行一致性约束,以更好地捕捉动作的时域特性。同时,FreqPolicy额外设计了一个频域分量的自适应关注策略,使得FreqPolicy在一致性约束中灵活关注重要频段。通过上述策略,FreqPolicy学习到了更优的转移轨迹,最终实现了由噪声到目标动作的一步生成。
在仿真基准中,FreqPolicy显著提升了一步流匹配策略的操作性能。相较于之前的一步动作生成方法SOTA性能,FreqPolicy在Robomimic测试基准上的平均性能提升了6%,在MetaWorld测试基准上的平均性能提升了8.9%。此外,当与OpenVLA等VLA模型相结合时,FreqPolicy能够在不损害操作性能的前提下,将推理速度提高至原来的5倍。
![]()
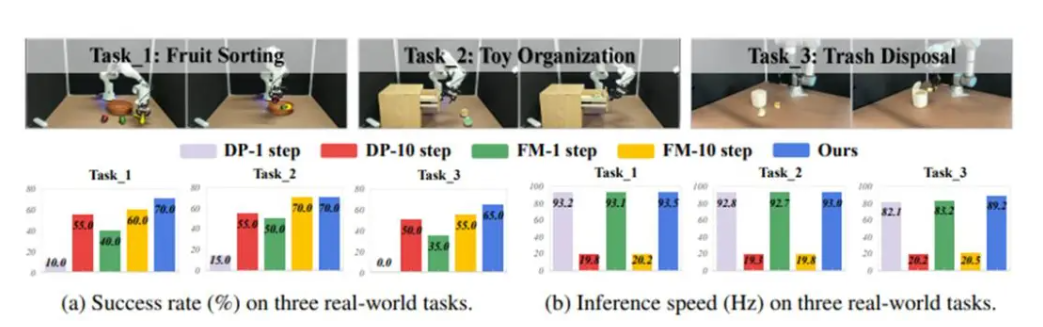
在真实场景应用中,FreqPolicy可以广泛适用于桌面操作、家居服务和工业作业等场景,取得了比标准扩散策略和标准流匹配策略更高的任务成功率,同时其推理频率提升了3-5倍。
未来,北京人形计划进一步优化该方法,同时提升其多峰分布建模能力和推理速度,并探索其在更复杂场景下的应用。