我们都知道,在开源的世界里,代码是最通用的语言也是最直接的沟通方式。无论是代码仓库上的协作,还是社区上的问答,代码始终是开发者交流的核心媒介。
过去的 2024 年,是 KWDB 社区的开源元年。在这一年 KaiwuDB 2.0 发布并开源,起名 KWDB ;也是在这一年,KWDB 捐赠给开放原子开源基金会,正式成为基金会孵化项目。作为开源数据库社区的新人,我们希望通过代码,结识更多有热情有理想的开发者,碰撞出不一样的火花,一同探索分布式多模数据库的创新之道。
春暖花开,让我们一起“码”上出发
用键盘码出你和 KWDB 的相识相知,用代码构建一座通向技术与创新的桥梁!
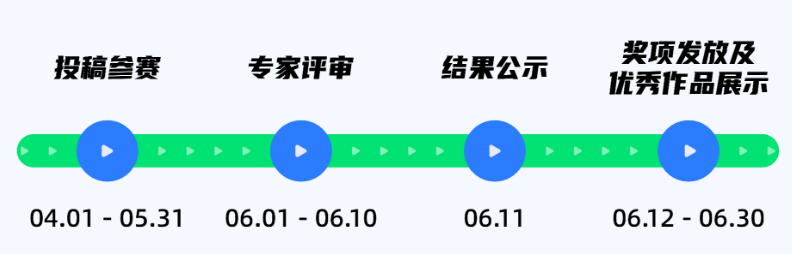
赛事安排
-
投稿参赛:04.01-05.31
-
专家评审:06.01-06.10
-
结果公示:06.11
-
奖项发放及优秀作品展示:06.12-06.30
征文奖励
|
奖项
|
名次
|
奖励
|
|
卓越奖 5 篇
|
第 1-5 名
|
创作者基金 2000 元/篇
|
|
优秀奖 10 篇
|
第 6-15 名
|
创作者基金 1000 元/篇
|
|
潜力奖 20 篇
|
第 16-35 名
|
创作者基金 600元/篇
|
|
人气特别奖 10 篇
|
人气前 10 名
|
价值 200 元 KWDB 限定周边大礼包
|
*注:允许参赛者多篇投稿,重复领奖
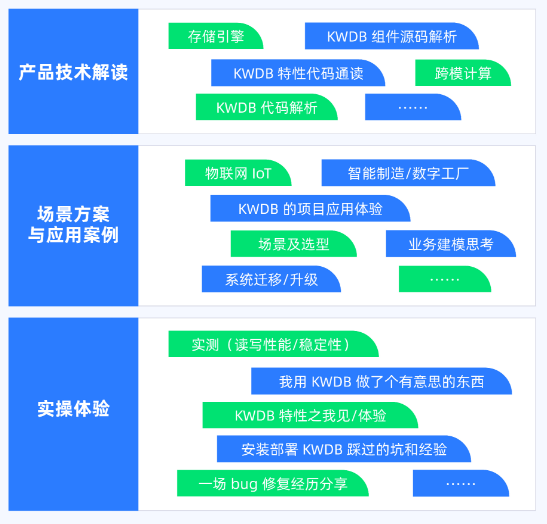
征文方向
-
产品技术解读 :存储引擎、KWDB 组件源码解析、KWDB 特性代码解读、跨模计算、KWDB 代码解析...
-
场景方案与应用案例:物联网 IoT 、智能制造/数字工厂、KWDB 的项目应用体验、场景与选型、业务建模思考、系统迁移/升级...
-
实操体验:实测(读写性能/稳定性)、我用 KWDB 做了个有意思的东西、KWDB 特性之我见/体验、安装部署 KWDB 踩过的坑或经验分享、一场 bug 修复经历...
投稿要求
1、
基础标准:建议大家优先前往
Gitee 下载最新版 KWDB 2.2.0 ,体验完成后围绕征文建议方向撰写博文。字数不少于 1000 字。(标点符号、代码字符不计入)
2、 尊重原创:征文内容须为原创/首发,不侵犯第三方版权或其他合法权益;不得有抄袭、洗稿、凑字数、广告导流等行为。一经发现,取消参赛资格。
3、 加分Tips :有代码、实操截图、总结图示或 demo 搭配更佳。
投稿规则
1、添加官方小助手—— 小K (微信号:KaiwuDB_Assistant ),加入 KWDB 创作者群;
2、在活动合作媒体端,包括 OSChina、CSDN、ITPUB、墨天轮社区,或个人公众号发布参赛作品,文章统一按如下格式命名: 【KWDB创作者计划】_文章主题;
3、在群公告中填写 作品征集链接,完成参赛作品提交,即视为报名参赛成功。
*注:若无法在上述媒体端发稿,可直接在作品征集链接中上传 word 版本稿件
KWDB 2.2.0 用户指南
评审专家阵容
快前往官方社区了解 KWDB 吧!
合作媒体:
*本活动最终解释权归 KWDB 社区所有