在前三篇文章中,我们深入探讨了 RoboMIND 数据集如何通过创新的遥操作采集系统和智能标注体系、从多个维度分析了RoboMIND数据集。详情可见
今天,作为本系列文章的最后一篇,我们将揭开RoboMIND数据集对机器人学习范式的影响,这背后不仅是算法参数的较量,更是数据科学对物理世界的精准映射。
一、多维度实验,深度剖析机器人学习能力
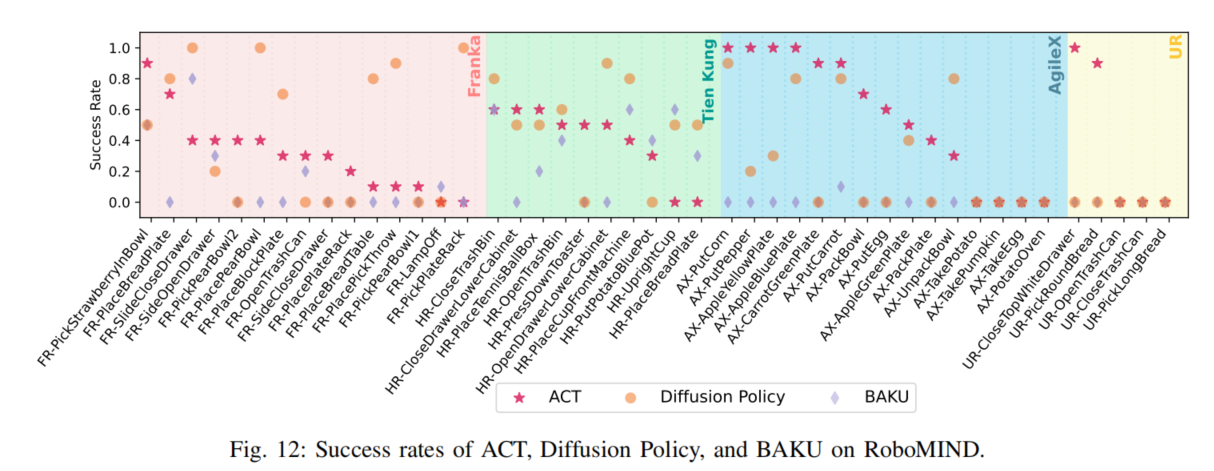
RoboMIND 的实验涵盖了多种机器人操作学习方法,通过一系列全面的实验,对这些方法的性能和局限性进行了深入评估。在单任务模仿学习模型方面,ACT、Diffusion Policy 和 BAKU 等模型在不同机器人平台上的表现各有千秋。
ACT 在 AgileX 平台上平均成功率达到了 55.3%,在一些人形机器人任务上更是表现出色,如 HR-CloseDrawerLowerCabinet 任务的成功率高达 60%。而 Diffusion Policy 在 Franka 和 Tien Kung 机器人上的一些任务中,展现出了超越 ACT 的学习能力。这些实验结果不仅彰显了 RoboMIND 数据集的高质量,也为模仿学习领域的发展提供了有力的支撑。
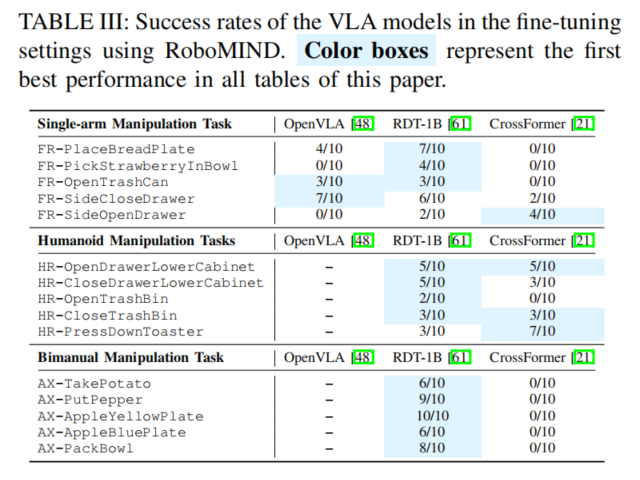
对于视觉语言动作大模型(VLA),RoboMIND 同样进行了全面的评估。RDT-1B、OpenVLA 和 CrossFormer 等模型在经过 RoboMIND 的微调后,在多种机器人任务上均表现出色。
其中,RDT-1B 在双臂操作任务上尤为突出,而 CrossFormer 在单臂和人形机器人任务上也展现出了显著的性能提升。这些大模型的强大泛化能力,使得它们能够适应不同类型的机器人和任务场景,为机器人的智能化发展提供了新的思路和方向。
二、泛化能力验证,适应多元场景与物体
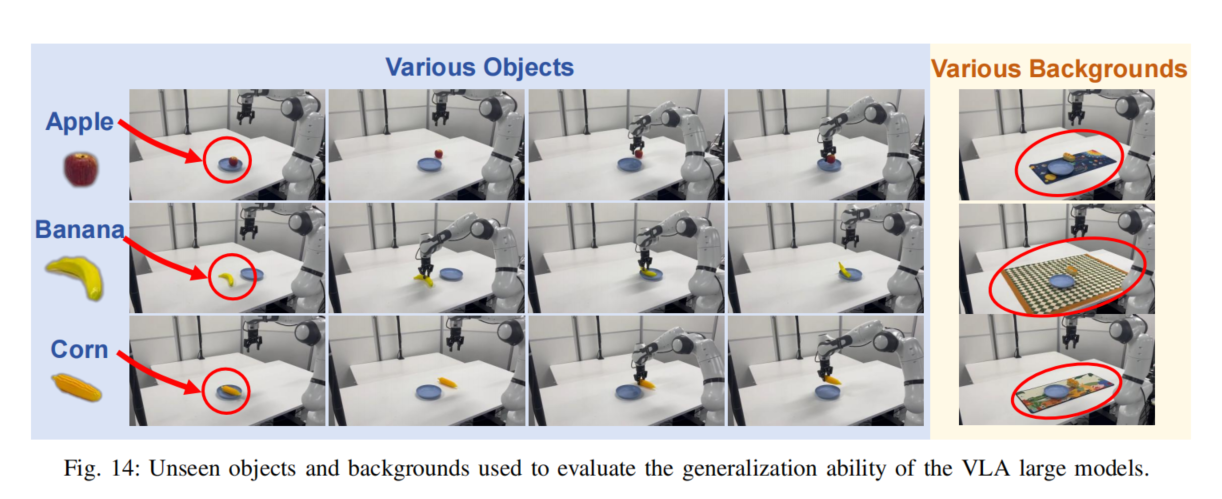
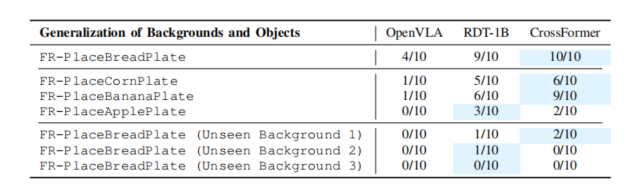
RoboMIND 对 VLA 大模型的泛化能力进行了严格的测试,以 Franka 机器人的 FR-PlaceBreadPlate 任务为例。在不同背景和物体的测试中,RDT-1B 和 CrossFormer 等模型展现出了良好的物体操作泛化能力,尤其是对于与训练数据中面包形状相似的物体,如香蕉等。然而,在面对未见过的背景时,模型的表现还有待进一步提升。这表明 RoboMIND 在推动模型适应多元场景方面,还有更多的潜力可挖掘,也为后续的研究和优化提供了明确的方向。
三、数据增强,提升大模型性能
RoboMIND 的价值不仅体现在评估模型性能上,更在于其能够显著提升 VLA 大模型的性能。通过将 RoboMIND 数据集应用于 RDT-1B 和 CrossFormer 等模型的预训练中,这些模型在多种机器人任务上的成功率得到了大幅提升。
例如,CrossFormer 在双臂任务上的表现从无法完成任务提升到了近乎每次测试都能成功完成,如 AX-TakePotato、AX-PutPepper 和 AX-AppleBluePlate 等任务。在人形机器人操作任务 HR-PressDownToaster 上,使用 RoboMIND 训练的 CrossFormer 也实现了近100% 的任务成功率。这充分证明了 RoboMIND 在增强模型性能、促进更有效和可靠的机器人操作方面的强大作用。
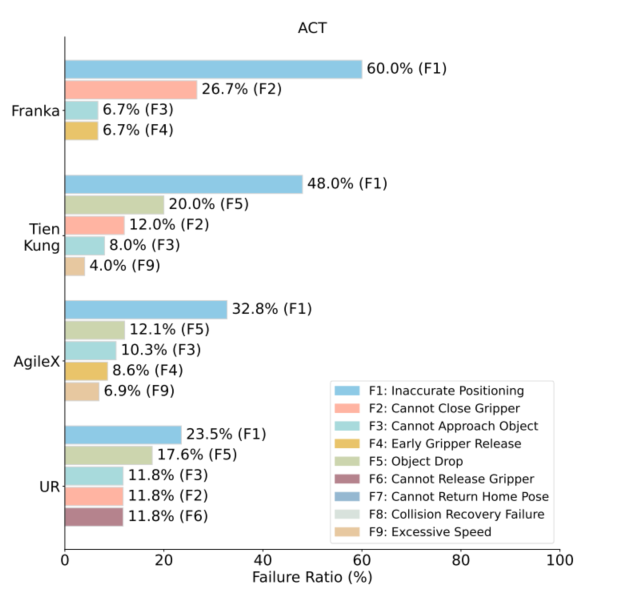
四、失败案例分析,助力数据优化
在实际测试中,RoboMIND 详细记录了模型执行任务的失败原因,如定位不准确、无法闭合夹爪、物体掉落等。这些失败案例为数据优化提供了宝贵的 insights。例如,针对定位不准确的问题,可以通过从之前被忽视的位置收集更多数据,来更好地代表任务环境,从而提高成功率。
而对于夹爪无法闭合的情况,则可以通过指导数据收集者在闭合夹爪时放慢速度,以确保捕获足够的帧数,降低训练难度。通过对数据收集实践的不断改进,能够进一步提升模仿学习算法的鲁棒性和可靠性,使其在实际应用中表现更佳。
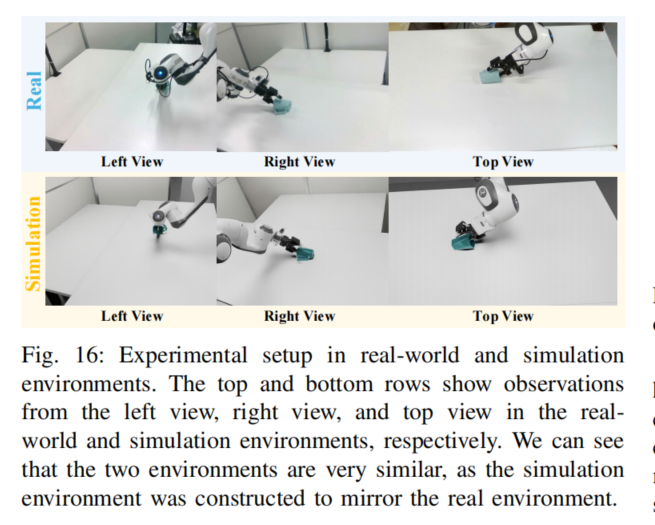
五、仿真与真实数据协同训练,提升模型鲁棒性
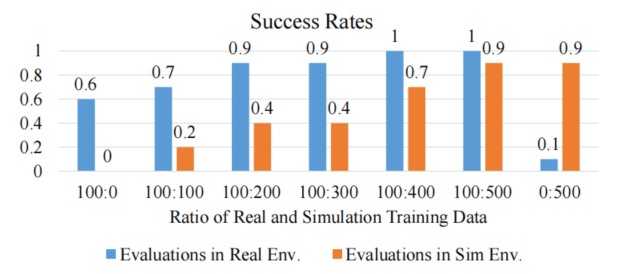
RoboMIND 在验证仿真数据有效性方面也进行了积极探索。通过将真实世界数据和仿真数据结合训练,发现随着仿真数据比例的增加,模型在真实世界和仿真环境中的成功率均有所提高。
然而,仅依靠仿真数据在真实世界中的表现仍存在不足,真实世界数据在模型训练中不可或缺。例如,在 Franka 机器人的 FR-UprightBlueCup 任务中,结合 100 条真实世界轨迹和 500 条仿真轨迹训练的模型,在仿真环境中成功率达到 90%,但在真实世界中使用仅仿真数据训练的模型成功率骤降至 10%。这凸显了仿真和真实数据协同训练的重要性,也为提高模型鲁棒性提供了新的途径。
通过持续挖掘和探索RoboMIND,我们期待其不仅成为研究人员宝贵的实验数据和研究平台,更能为机器人技术的实际应用注入新的活力。此刻,实验室里那个曾反复打滑的机械臂,正在以毫米级精度将面包片放入餐盘——这是VLA模型在300小时增强训练后的成绩单,更是RoboMIND数据引擎点燃的智能革命火种。
当您看到这里,不妨思考:我们距离让机器人真正理解'香蕉与面包的形态差异',还差多少个高质量标注帧?答案或许就藏在您即将开启的下一个数据采集周期中。这场人机共舞的序曲已奏响,而您,正站在指挥席上。