摘要:本篇文章主要讲解Python调用OpenCV获取图像属性,截取感兴趣ROI区域,处理图像通道。
本文分享自华为云社区《[Python图像处理] 三.获取图像属性、兴趣ROI区域及通道处理 | 【生长吧!Python】》,作者: eastmount 。
一.获取图像属性
1.形状-shape
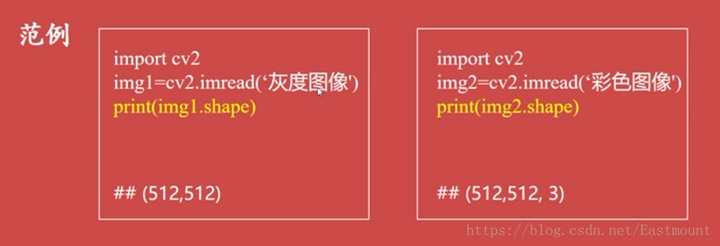
通过shape关键字获取图像的形状,返回包含行数、列数、通道数的元祖。其中灰度图像返回行数和列数,彩色图像返回行数、列数和通道数。如下图所示:
![]()
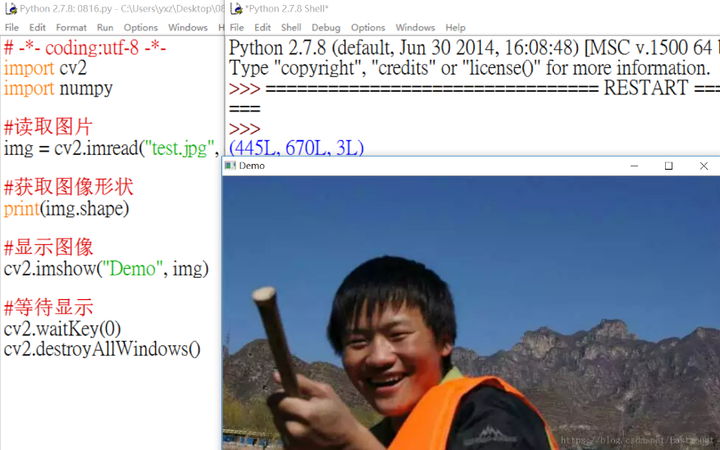
# -*- coding:utf-8 -*-
import cv2
import numpy
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#获取图像形状
print(img.shape)
#显示图像
cv2.imshow("Demo", img)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
输出结果如下图所示:(445L, 670L, 3L),该图共445行、670列像素,3个通道。
![]()
2.像素数目-size
通过size关键字获取图像的像素数目,其中灰度图像返回行数 * 列数,彩色图像返回行数 * 列数 * 通道数。代码如下:
# -*- coding:utf-8 -*-
import cv2
import numpy
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#获取图像形状
print(img.shape)
#获取像素数目
print(img.size)
输出结果:
(445L, 670L, 3L)
894450
3.图像类型-dtype
通过dtype关键字获取图像的数据类型,通常返回uint8。代码如下:
# -*- coding:utf-8 -*-
import cv2
import numpy
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#获取图像形状
print(img.shape)
#获取像素数目
print(img.size)
#获取图像类型
print(img.dtype)
输出结果:
(445L, 670L, 3L)
894450
uint8
二.获取感兴趣ROI区域
ROI(Region of Interest)表示感兴趣区域。它是指从被处理图像以方框、圆形、椭圆、不规则多边形等方式勾勒出需要处理的区域。可以通过各种算子(Operator)和函数求得感兴趣ROI区域,并进行图像的下一步处理,被广泛应用于热点地图、人脸识别、图像分割等领域。
![]()
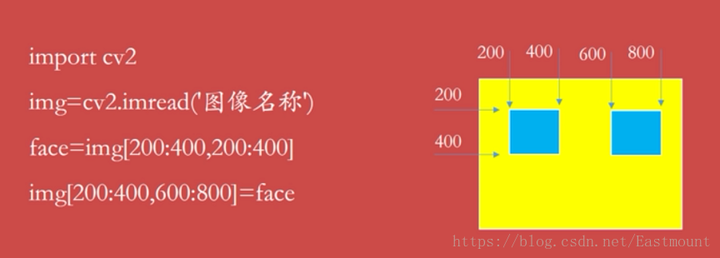
通过像素矩阵可以直接获取ROI区域,如img[200:400, 200:400]。
![]()
代码如下:
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#定义200*100矩阵 3对应BGR
face = np.ones((200, 100, 3))
#显示原始图像
cv2.imshow("Demo", img)
#显示ROI区域
face = img[200:400, 200:300]
cv2.imshow("face", face)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
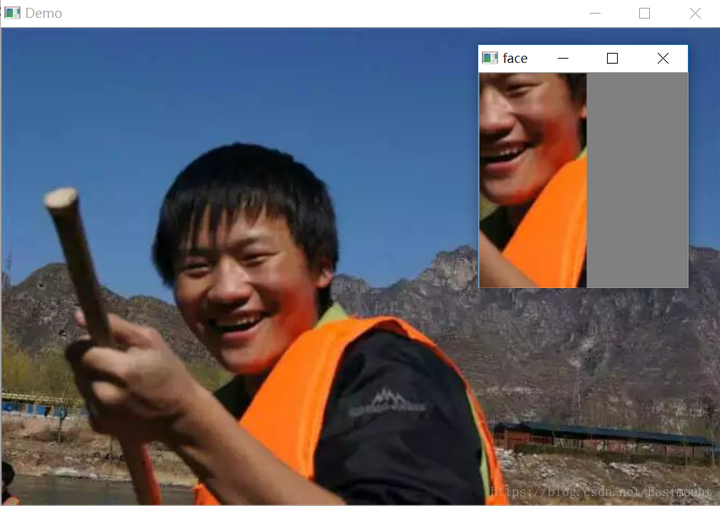
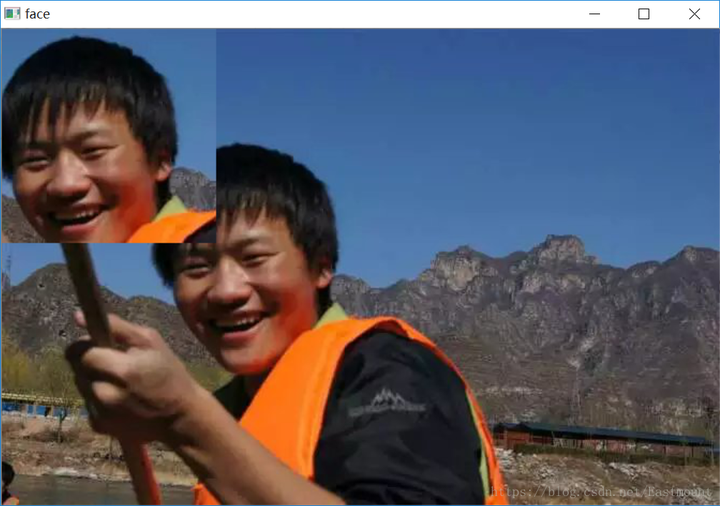
输出结果如下图所示:
![]()
下面将提取的ROI图像进行融合实验,代码如下:
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#定义300*100矩阵 3对应BGR
face = np.ones((200, 200, 3))
#显示原始图像
cv2.imshow("Demo", img)
#显示ROI区域
face = img[100:300, 150:350]
img[0:200,0:200] = face
cv2.imshow("face", img)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
将提取的头部融合至图像左上角部分,如下图所示:
![]()
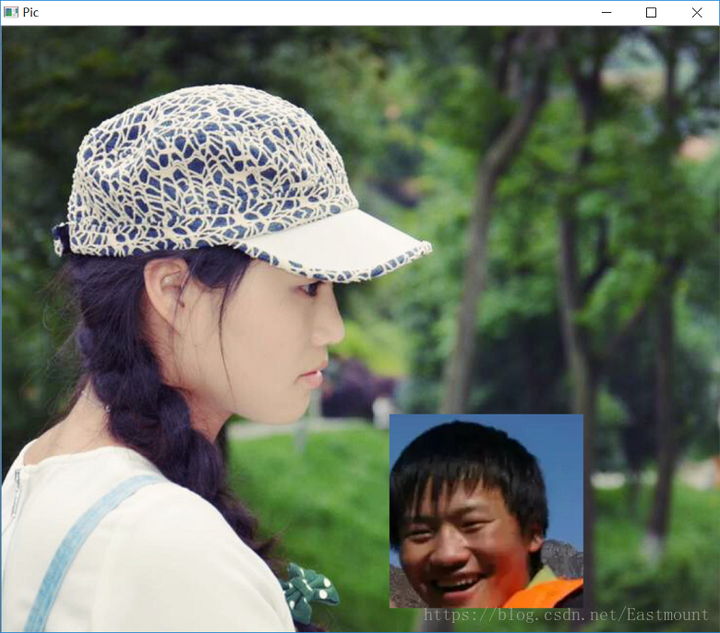
如果想将两张图像进行融合,只需再读取一张图像即可,方法原理类似。 实现代码如下:
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
test = cv2.imread("test3.jpg", cv2.IMREAD_UNCHANGED)
#定义300*100矩阵 3对应BGR
face = np.ones((200, 200, 3))
#显示原始图像
cv2.imshow("Demo", img)
#显示ROI区域
face = img[100:300, 150:350]
test[400:600,400:600] = face
cv2.imshow("Pic", test)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
输出结果如下图所示:
![]()
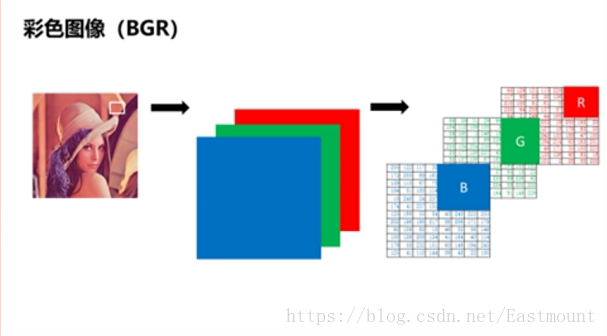
三.图像通道处理
1.通道拆分
OpenCV读取的彩色图像由B、G、R三原色组成,可以通过下面代码获取不同的通道。
b = img[:, :, 0]
g = img[:, :, 1]
r = img[:, :, 2]
![]()
也可以使用split()函数拆分通道,下面是拆分不同通道再显示的代码。
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#拆分通道
b, g, r = cv2.split(img)
#显示原始图像
cv2.imshow("B", b)
cv2.imshow("G", g)
cv2.imshow("R", r)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
输出结果如下图所示:
![]()
也可以获取不同的通道,核心代码如下所示: b = cv2.split(a)[0] g = cv2.split(a)[1] r = cv2.split(a)[2]
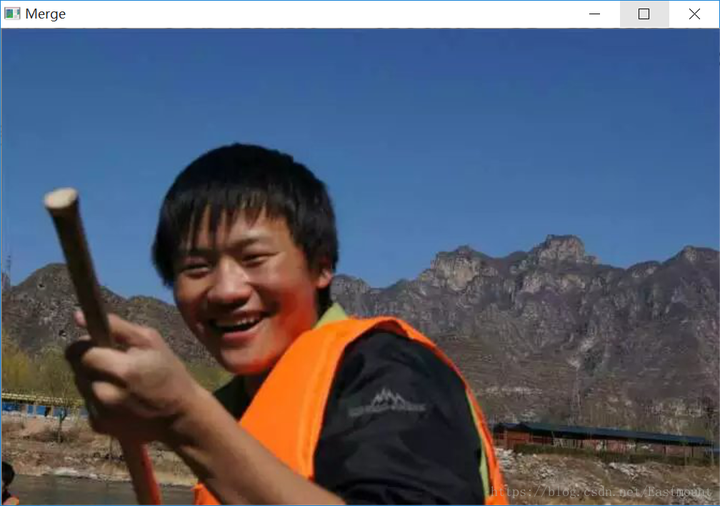
2.通道合并
图像通道合并主要调用merge()函数实现,核心代码如下:
m = cv2.merge([b, g, r])
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
#拆分通道
b, g, r = cv2.split(img)
#合并通道
m = cv2.merge([b, g, r])
cv2.imshow("Merge", m)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
输出结果如下:
![]()
注意,如果是合并[r,g,b]三通道,则显示如下所示,因OpenCV是按照BGR进行读取的。
b, g, r = cv2.split(img)
m = cv2.merge([r, g, b])
cv2.imshow(“Merge”, m)
![]()
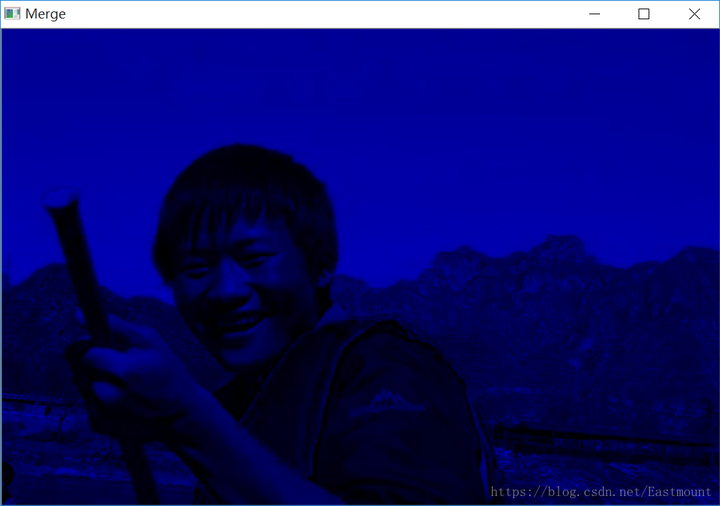
同时,可以提取图像的不同颜色,提取B颜色通道,G、B通道设置为0,则显示蓝色。代码如下所示:
# -*- coding:utf-8 -*-
import cv2
import numpy as np
#读取图片
img = cv2.imread("test.jpg", cv2.IMREAD_UNCHANGED)
rows, cols, chn = img.shape
#拆分通道
b = cv2.split(img)[0]
g = np.zeros((rows,cols),dtype=img.dtype)
r = np.zeros((rows,cols),dtype=img.dtype)
#合并通道
m = cv2.merge([b, g, r])
cv2.imshow("Merge", m)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
蓝色通道输出结果如下所示:
![]()
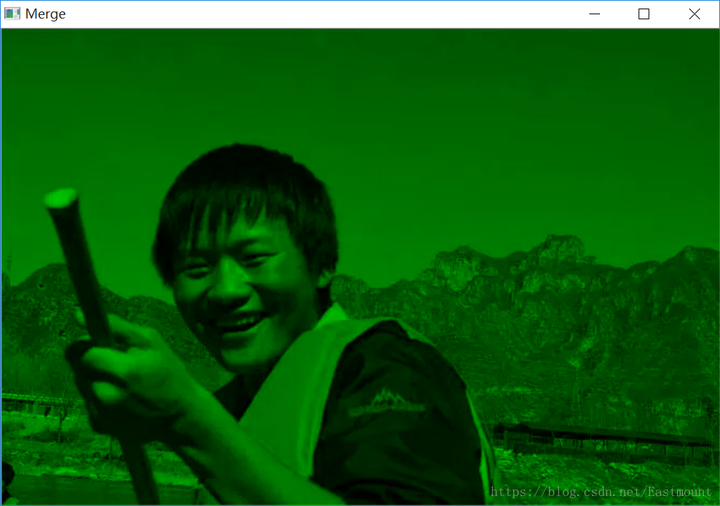
绿色通道核心代码及输出结果如下所示:
rows, cols, chn = img.shape
b = np.zeros((rows,cols),dtype=img.dtype)
g = cv2.split(img)[1]
r = np.zeros((rows,cols),dtype=img.dtype)
m = cv2.merge([b, g, r])
![]()
红色通道修改方法与上面类似。希望文章对大家有所帮助,如果有错误或不足之处,还请海涵。
该系列在github所有源代码:
点击关注,第一时间了解华为云新鲜技术~