kali下配置conky,实现桌面美化监控系统
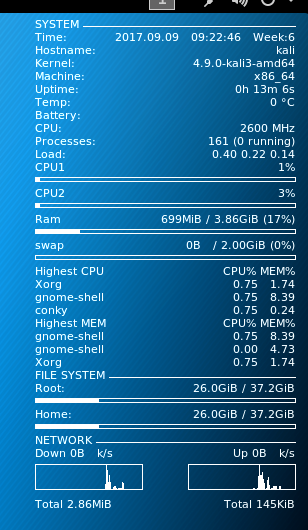
版权声明:转载请注明出处:http://blog.csdn.net/dajitui2024 https://blog.csdn.net/dajitui2024/article/details/79396653 更多参考:1、https://bbs.deepin.org/forum.php?mod=viewthread&tid=28762&extra=2、https://bbs.deepin.org/forum.php?mod=viewthread&tid=36296&extra= sudo apt-get install conky -y 安装conky vim /root/.conkyrc 配置conky 配置内容如下: # set to yes if you want Conky to be forked in the background background no cpu_avg_samples 2 net_avg_samples 2 out_to_console no # X font when Xft is disabled, you can pick one with program xfontsel #font 7x12 #font 6x10 #font 7x13 #font 8x13 #font 7x12 #font *mintsmild.se* #font -*-*-*-*-*-*-34-*-*-*-*-*-*-* #font -artwiz-snap-normal-r-normal-*-*-100-*-*-p-*-iso8859-1 # Use Xft? use_xft yes # Xft font when Xft is enabled xftfont Sans:size=8 own_window_argb_visual yes #own_window_colour hotpink # Text alpha when using Xft xftalpha 0.8 # on_bottom yes # mail spool mail_spool $MAIL # Update interval in seconds update_interval 1 # Create own window instead of using desktop (required in nautilus) own_window yes own_window_transparent yes own_window_hints undecorated,below,sticky,skip_taskbar,skip_pager #own_window_type override own_window_type normal # Use double buffering (reduces flicker, may not work for everyone) double_buffer yes # Minimum size of text area minimum_size 260 5 maximum_width 400 # Draw shades? draw_shades no # Draw outlines? draw_outline no # Draw borders around text draw_borders no # Stippled borders? stippled_borders no # border margins border_margin 4 # border width border_width 1 # Default colors and also border colors default_color white default_shade_color white default_outline_color white # Text alignment, other possible values are commented #alignment top_left #minimum_size 10 10 gap_x 15 gap_y 20 alignment top_right #alignment bottom_left #alignment bottom_right # Gap between borders of screen and text # Add spaces to keep things from moving about? This only affects # certain objects. use_spacer none # Subtract file system buffers from used memory? no_buffers yes # set to yes if you want all text to be in uppercase uppercase no # none, xmms, bmp, audacious, infopipe (default is none) # xmms_player bmp TEXT ${color white}SYSTEM ${hr 1}${color} Time:$alignr${time %Y.%m.%d}$alignc ${time %H:%M:%S}$alignr Week:${time %w} Hostname: $alignr$nodename Kernel: $alignr$kernel Machine:$alignr$machine Uptime: $alignr$uptime Temp: ${alignr}${acpitemp} °C Battery:$alignr${battery BAT0} #Battery:$alignr${battery_percent BAT0}% CPU: ${alignr}${freq dyn} MHz Processes: ${alignr}$processes ($running_processes running) Load: ${alignr}$loadavg CPU1 ${alignr}${cpu cpu1}% ${cpubar 4 cpu1} CPU2 ${alignr}${cpu cpu2}% ${cpubar 4 cpu2} Ram ${alignr}$mem / $memmax ($memperc%) ${membar 4} swap ${alignr}$swap / $swapmax ($swapperc%) ${swapbar 4} Highest CPU $alignr CPU% MEM% ${top name 1}$alignr${top cpu 1} ${top mem 1} ${top name 2}$alignr${top cpu 2} ${top mem 2} ${top name 3}$alignr${top cpu 3} ${top mem 3} Highest MEM $alignr CPU% MEM% ${top_mem name 1}$alignr${top_mem cpu 1} ${top_mem mem 1} ${top_mem name 2}$alignr${top_mem cpu 2} ${top_mem mem 2} ${top_mem name 3}$alignr${top_mem cpu 3} ${top_mem mem 3} ${color white}FILE SYSTEM ${hr 1}${color} Root: ${alignr}${fs_free /} / ${fs_size /} ${fs_bar 4 /} Home: ${alignr}${fs_free /home} / ${fs_size /home} ${fs_bar 4 /home} ${color white}NETWORK ${hr 1}${color} Down ${downspeed eth0} k/s ${alignr}Up ${upspeed eth0} k/s ${downspeedgraph eth0 25,107} ${alignr}${upspeedgraph eth0 25,107} Total ${totaldown eth0} ${alignr}Total ${totalup eth0} #${color white}NEWS $color #${rss http://www.linuxeden.com/plus/rss.php?tid=1 5 item_titles 2} 效果如图 启动工具 root@kali:/opt# cat cokyrun.sh #!/bin/bash /usr/bin/conky &