地平线宣布正式发布并开源HoloMotion-1,一个面向人形机器人全身控制打造的 4 亿参数级机器人小脑大模型。
根据介绍,HoloMotion-1依托更大的模型容量,面向更丰富的动作分布和更长时序的运动连续性,建模更复杂的身体协同关系。并结合MoE稀疏激活与KV-cache推理机制,在保持 4 亿参数级模型容量的同时降低单步推理开销,实现端侧约 300FPS 的实时运行能力,显著高于常见 50Hz 控制频率要求。
在模型架构上,HoloMotion-1采用MoE-Transformer policy。系统以参考动作和机器人本体观测为输入,通过reference-conditioned router进行稀疏专家路由,再由Transformer主干网络和action head输出机器人全身控制动作。
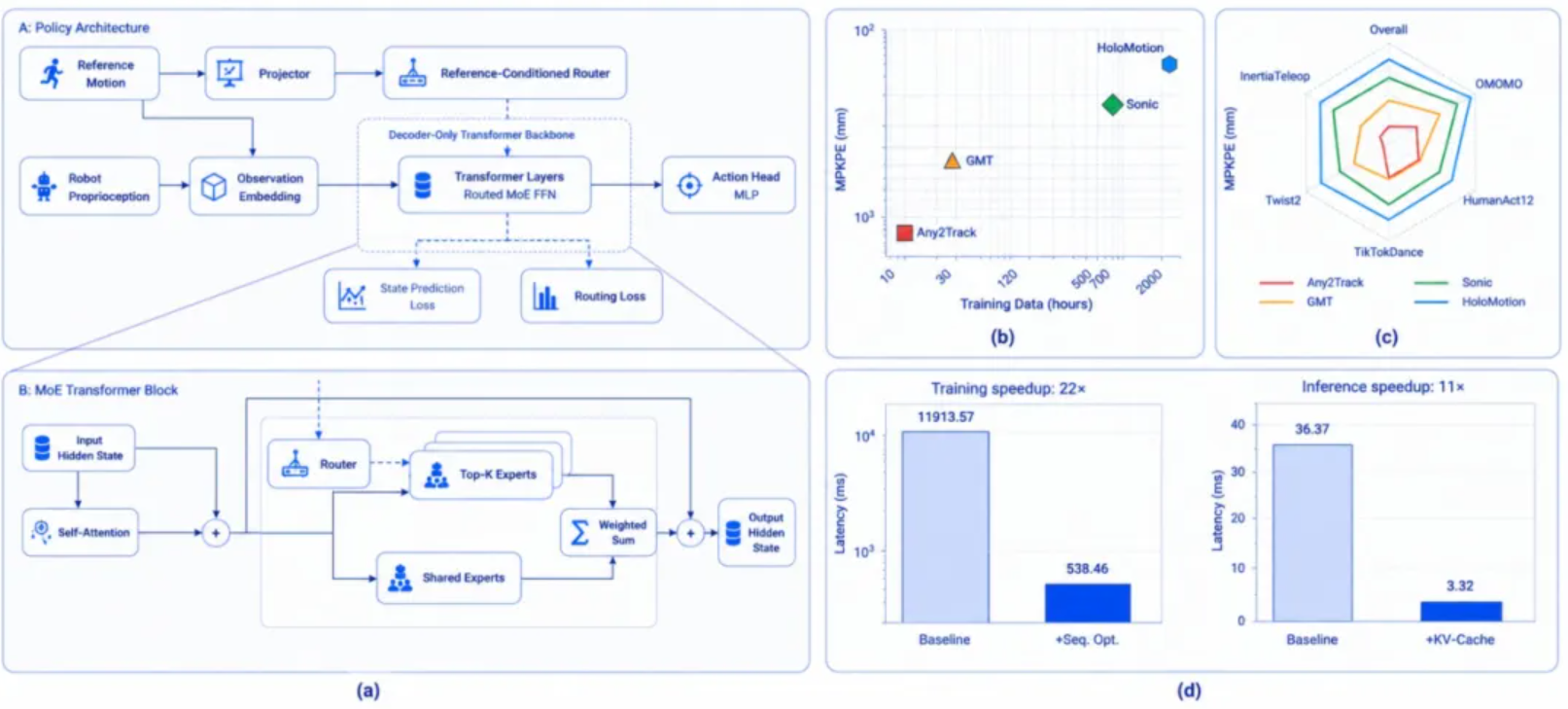
这一设计使模型具备更强的动作表达能力,同时通过稀疏激活控制实际推理开销。结合序列级训练优化与KV-cache推理优化,HoloMotion-1在报告设置下将推理延迟降低至3.32ms,对应约300FPS的端侧实时推理能力,可满足真实机器人高频控制需求。
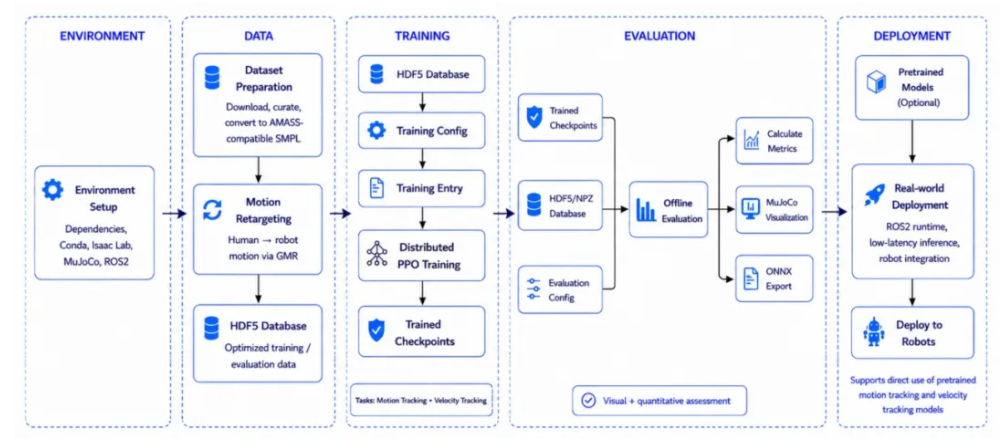
HoloMotion提供从环境配置到真实机器人部署的端到端工具链,覆盖全流程。开发者既可以基于自定义动作数据重新训练模型,也可以直接使用开源的预训练motion tracking和velocity tracking模型进行部署验证。
HoloMotion-1首先建立的能力是:Imitate Any Pose,即机器人运控领域中的通用motion tracking任务。也就是说,机器人不仅要会走路、站立或执行少量预设动作,还要能够从大规模开放动作数据中学习复杂全身姿态,并迁移到真实机器人上稳定执行。
HoloMotion-1使用多来源动作数据进行训练,包括互联网视频恢复动作、光学动捕数据、 VR遥操作数据和惯性动捕遥操作数据。通过统一的数据处理和动作重定向流程,系统将人类动作转化为适合机器人学习和控制的训练数据。

公告称,HoloMotion-1是HoloMotion技术路线的第一阶段,重点解决模仿任意姿态 (Imitate Any Pose) ,即从视频、MoCap和遥操作数据中学习复杂全身动作。HoloMotion-1已经围绕这一能力建立了完整模型、数据和部署流程。
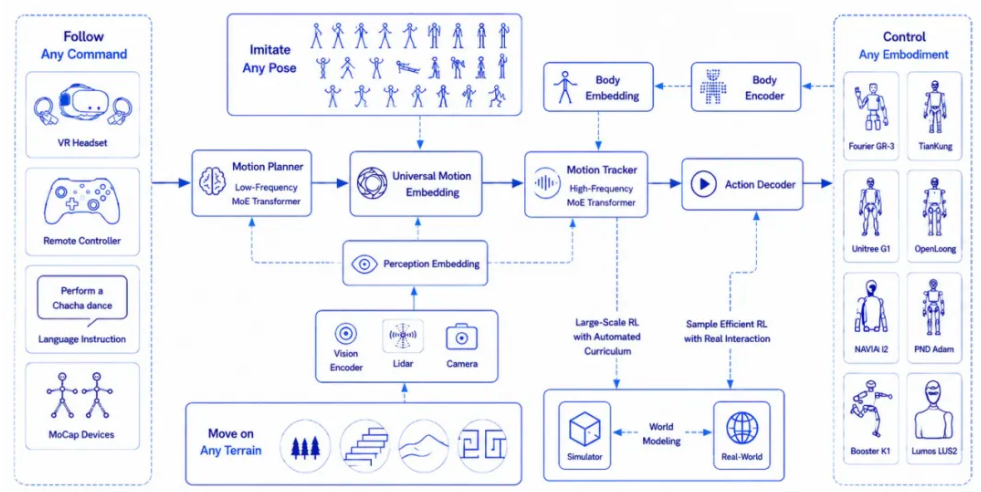
面向未来,HoloMotion将继续向三个方向演进:
- 遵循任意指令 (Follow Any Command) :进一步支持VR设备、遥控器、语言指令等多模态命令输入,让机器人从“模仿动作”走向“根据指令生成和执行动作”。
- 跨越任意地形 (Move on Any Terrain) :结合视觉、激光雷达、相机和世界模型,让机器人能够在楼梯、坡道、复杂室内外环境中稳定移动。
- 控制任意本体 (Control Any Embodiment) :通过body encoder和body embedding支持不同机器人本体,使同一套运动控制框架能够适配不同尺寸、自由度和结构的人形机器人。