在前两篇文章中,我们深入探讨了RoboMIND数据集如何通过创新的遥操作采集系统和智能标注体系(如AI与人工结合的标注策略)。详情可见
如果说数据是具身智能的“燃料”,那么对数据的定量与定性分析则是点燃技术突破的“火种”——它不仅能揭示数据集的深度与广度,更能为机器人策略的泛化能力提供科学验证。本篇作为系列第三篇文章,我们将从异构构型、任务设计、物体多样性等维度展开剖析,展现RoboMIND如何通过系统性设计突破机器人学习的关键瓶颈,并为行业树立新的Benchmark标准
一、定量分析:揭示数据集的深度与广度
(一)异构机器人体型
数据集包含了单臂机器人(Franka Emika Panda 和 UR5e 配备夹爪)、双臂机器人(AgileX Cobot Magic V2.0 配备夹爪)以及人形机器人(Tien Kung 配备灵巧手)。这种多样化的机器人体型组合,为模型在不同动作和关节自由度上的泛化能力提供了坚实基础。
Franka 在数据集中占比 49.2%,其中既包括来自数字孪生环境的模拟轨迹,也有通过人类远程操作收集的真实世界轨迹。而双臂机器人和人形机器人的加入,则进一步丰富了数据集的多样性和复杂性,尤其适合训练协调技能和长时域任务。
(二)任务长度的多样性
不同机器人体型所执行的任务在时间跨度上也展现出显著差异。Franka 和 UR 的任务轨迹较短(少于 200 个时间步),适合训练基础技能;而 Tien Kung 和 AgileX 的任务轨迹较长(超过 500 个时间步),更有利于长时域任务训练和技能组合。
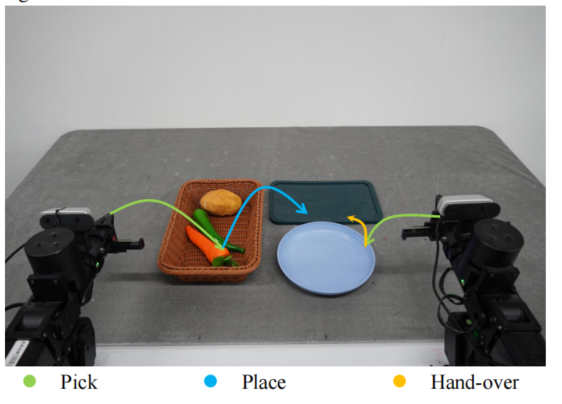
以 AgileX 的 AX-PutCarrot 任务为例,该任务涉及抓取、传递和放置三个不同技能,整个过程需要双臂机器人进行复杂协调和长时域操作,充分展示了数据集中长时域任务的构建方式。
(三)任务分类
RoboMIND 的任务分类独具匠心,依据操作技能从任务语言描述中总结而来,综合考虑了动作、物体和轨迹时域等多个维度。具体分为六类:
-
关节操作(Articulated Manipulations):如开关具有关节的物体;
-
协调操作(Coordination Manipulations):机器人双臂之间的协调;
-
基本操作(Basic Manipulations):如抓取、放置等基础技能;
-
多物体交互(Multiple Object Interactions):与多个物体的交互;
-
精密操作(Precision Manipulations):如倒液体、插入电池等复杂控制技能;
-
场景理解(Scene Understanding):涉及场景语义理解的动作。
这种细致入微的任务分类,使得 RoboMIND 能够涵盖从基础到复杂的各类操作技能,极大地增强了策略模型在处理复杂和长时域任务时的鲁棒性。
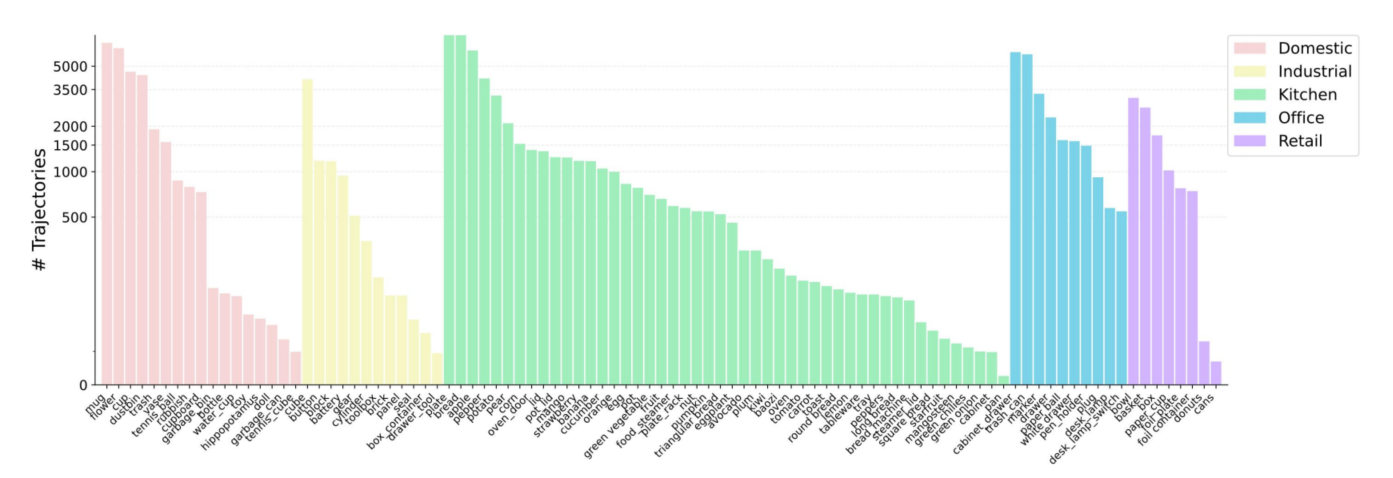
(四)多样的物体
数据集包含来自五个使用场景的 96 个以上物体类别,几乎涵盖了日常生活中的大多数场景:家庭、工业、厨房、办公室和零售。从厨房中的常见食物到办公室中的小物件,丰富多样的物体类别增加了数据集的复杂性,为模型在面对未知物体时的泛化能力提供了有力支持。
二、定性分析:数据集的独特优势
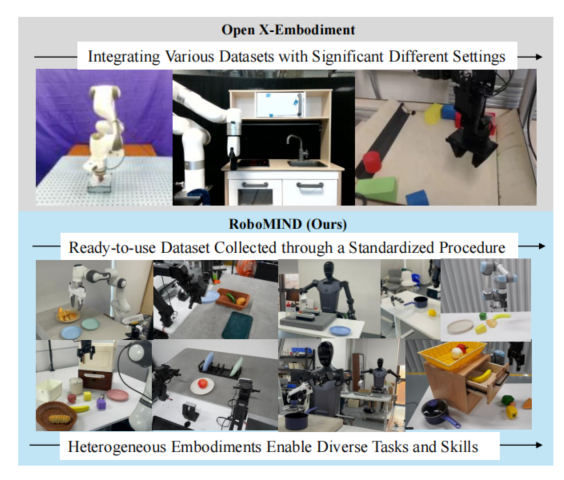
(一)标准化设置
RoboMIND 采用精心设计的标准化程序进行数据收集,使其成为一个易于使用的现实世界操作数据集。与 Open X-Embodiment 等其他大型机器人学习数据集相比,RoboMIND 的异构机器人体型、多样化任务和多种技能,在保持数据集易用性的同时,更适合训练可泛化的策略,无论是基础技能还是长时域操作。
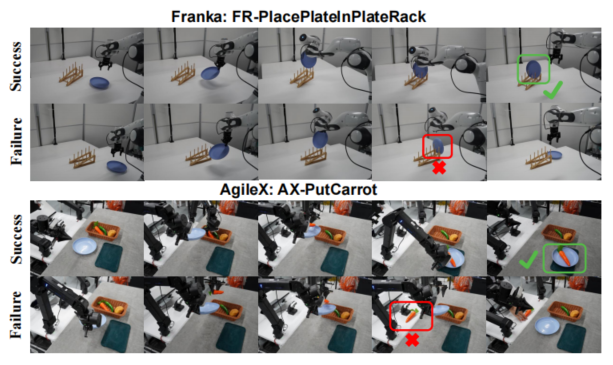
(二)失败案例展示
RoboMIND 还发布了约5k条机器人任务失败案例的轨迹数据。这些失败案例包括人类操作员未能完成任务的情形,以及机器人在执行操作任务过程中遇到故障的情况。通过对这些失败案例的分析和记录,不仅有助于提升数据集的质量,还能为策略模型提供反思失败动作的能力,进一步优化任务执行效果。
通过对RoboMIND数据集的全面评估可以发现,其价值不仅在于规模,更在于 多维度的技术穿透力:从短时基础技能到长达500步的复杂协调操作,从单一场景到跨领域的物体泛化,从标准化采集到失败案例的反思学习,这一数据集正在重新定义机器人学习的可能性边界。