你可能听过 OpenCat,或者在某个视频见过它小跑的身影。今天,我想和你们聊聊,这只小小的四足机器人,是如何从我脑海中的一个模糊念头,一步步走到今天的公司化运营的。这不仅仅是一个创客项目,更像是一场漫长的、充满惊喜与挑战的造物之旅。回首这些年,有无数个挑灯夜战的夜晚,有无数次从头再来的挫败,但每一次小小的突破,都像一束光,照亮了前行的路。
![http://oscimg.oschina.net/AiCreationDetail/up-27a06295e45840dd9977d4d99fc2e34e.png]()
先插入一个广告:8 月 28 日,开源中国源创会(以及 IOTE 国际物联网展会)将会举办,届时 OpenCat 会在线下与大家相见,可编程机器猫将与你互动,看完本文,如果你感兴趣欢迎到活动现场玩耍!
⏰活动时间:8 月 28 日 (周 4️⃣) 14:00 - 17:00
🏠地点:深圳・国际会展中心 (宝安) 11 号馆・会场五
萌芽:当“肌肉记忆”遇上微控制器——那段树莓派与我的独行岁月
2016年我28岁,刚刚博士和硕士毕业,在收尾一个波音的专利项目,同时寻找工作,出于“技多不压身”的想法开始玩树莓派。我也是在那时看到了波士顿动力的灵活的“大狗” ,它在视频里展现的动态平衡和敏捷,让我心潮澎湃,也让我看到了一个未来的幻影。当我用树莓派搭建起一个带探头的旋转平台时,我脑子里就升起一个简单的念头:能不能造一个平价版的、能像真动物一样灵活的小机器人?
在我发布OpenCat项目之前,有人认为我的想法是不可能的
我不想造那种笨拙的、只会重复固定动作的玩具,而是希望能像真正的小动物一样,带着点灵气,甚至能“学习”的伙伴。这个念头在我心里生根发芽,最终凝结成了 OpenCat 的核心哲学:以仿生和平价的物料,通过设计巧思和算法让机器拥有有生命感。仅仅过了一个月,能东张西望,四处行走的雪糕棒机器猫就在我的单间宿舍诞生了。
虽然初具雏形,但要让机器人走得自然、优美并不简单,想当然的公式只能勉强让它挪动。我基于物理和算法的第一性原理,结合观察动物视频和自己在地板上爬行,推导出了一套可调参的步态算法,并在后来和机器人专业的朋友谈起时才知道,这就是他们熟知的运动学逆解。然后,按照当时刷算法题的习惯,对这套算法进行了一系列的优化,实现更快的调用和平衡的反馈。
这听起来有点玄乎,但其实很简单。就像我们走路、跑步,大脑不会实时计算每一步的肌肉收缩,而是调用那些早已固化的“模式”。我想,机器人也应该如此。把那些复杂的、周期性的运动模式预先存储起来,让它在需要时能瞬间调用,而不是每次都从头计算。这种“肌肉记忆”的设计,不仅让机器人的动作更流畅、更具生命感,更重要的是,它大大降低了对主控芯片实时计算能力的严苛要求,从而显著降低了硬件成本,让平价的机器人也能拥有高级的运动能力。
最初,OpenCat 就是一个基于树莓派的学习项目,我尝试了多进程和多线程编程,把感知、决策、运动和通信任务希望最大限度地平均分配到它的4个运算核心上。但树莓派这块小板子,虽然能处理复杂的图像、规划行为,但处理简单的实时性的运动任务反而不够快。所以光有“大脑”不够,还需要一个能实时控制“肌肉”的“小脑”。那时候,我一个人摸索,无数次尝试,无数次失败,才终于找到了那个平衡点——巧妙地引入了 Arduino,让它成为我们核心的“中央模式生成器” 。
这种分层架构,就像是把机器人的“思考”和“行动”解耦了。树莓派可以专注于复杂的视觉识别、路径规划和智能决策,而无需承担实时计算每一个关节运动的繁重任务。而 Arduino 则能精确、低延迟地控制每一个舵机,确保动作的流畅和稳定。这种设计,在当时的我看来,是克服了无数技术难题后,才找到的兼顾性能与成本的“最优解”,它大大降低了技术和财务的门槛,让更多人能接触到动态四足机器人。
经过一年的专注研发,我把所有的积蓄和精力都投入了进去,创立了 Petoi 有限责任公司。2018年,OpenCat 的基础代码正式发布,我希望它能像智能手机的 Android 操作系统一样,成为一个开放的、人人可用的框架,鼓励更多人参与到四足机器人、物联网和人工智能的开发中来。那段日子,虽然孤独,但每当看到代码在机器上跑起来,就觉得一切都值了。它就像一块画布,等待着每一个开发者、每一个梦想家去添上自己的色彩。
初啼:Nybble 的木质足迹——我的第一个“孩子”与众筹的奇迹
我的第一个产品化的“孩子”,是 Nybble。它就像一个粗糙却充满生命力的草图,承载了我最初的梦想。
Nybble 的身体是用激光切割的木头拼起来的。选择木头,正是我们“平价物料”哲学的第一步。它成本低廉,易于加工,非常适合快速原型开发和早期迭代,让更多人能以可承受的价格拥有自己的机器人。看着那些木质部件在手中慢慢拼凑成一只猫的形状,那种感觉,就像是赋予了它最初的骨架,充满了仪式感。
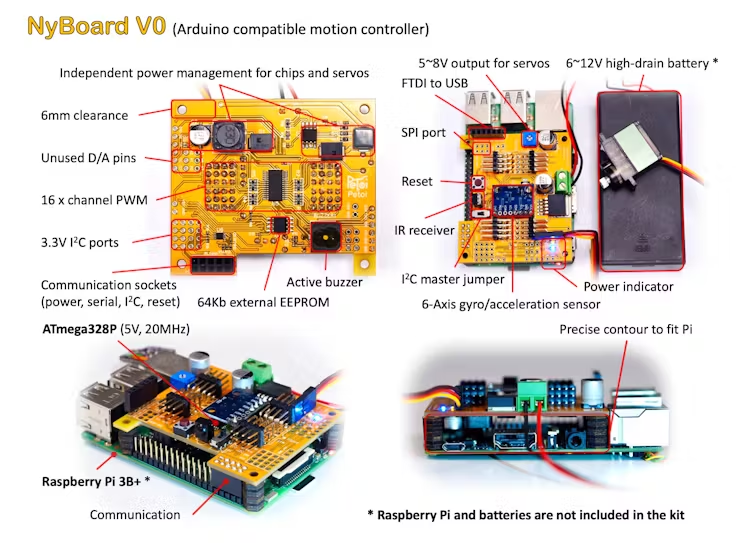
NyBoard V0
它的“大脑”是一块小小的Arduino Pro Mini,和我们熟悉的 Arduino Uno 用的是同一颗 ATmega328P 芯片。别看它小(16MHz CPU, 32KB Flash, 2KB SRAM),Nybble 所有的自适应运动逻辑和UI,都通过我刷题时练出来的奇技淫巧在这颗芯片上实现了。我给它写了一套固件,让它能持续监听来自外界的“指令”。你可以通过 Arduino IDE 的串口监视器,或者蓝牙模块,甚至外接一块树莓派,给它发号施令。
我至今还记得,第一次给它发送“m8 30”(让第8个关节转30度)或者“kwkL”(让它向左走)时,Nybble 真的动起来了!那种激动,就像是看着自己的孩子迈出了第一步。Nybble 能够“奔跑并向用户学习”,这证明了我的“肌肉记忆”设计是可行的。它虽然简单,却为 OpenCat 的未来奠定了坚实的基础,也吸引了第一批志同道合的伙伴加入。那时候,我常常一个人在实验室里,看着它笨拙却充满希望的步伐,心里充满了对未来的憧憬。
为了让 Nybble 真正走向大众,我需要资金来获得 NyBoard 的认证并启动大规模生产。于是,我发起了第一次众筹。2018年11月21日,Nybble 在 Indiegogo 上成功筹集了 136,536 美元,得到了 585 位支持者的慷慨相助。这笔资金对我们来说,简直是雪中送炭,它不仅证明了我们的想法得到了认可,更让我看到了社区的力量和这个项目巨大的潜力。
蜕变:Bittle 的智能飞跃——从“我”到“我们”的征程与市场的认可
Nybble 成功了,但它也教会了我很多。木质框架虽然便宜,但不够坚固;控制板虽然能用,但集成度不高。我深知,要让 OpenCat 走得更远,必须进行一次彻底的升级。于是,我开始构思 OpenCat 的下一个篇章——Bittle。
在 Bittle 的开发阶段,我从美国回到了国内,先是在柴火空间入驻了半年,解决了Nybble的本地化生产。疫情爆发后,我应供应商的邀请,搬去了他们东莞的工厂,他们提供免费的食宿。我不再是孤军奋战,有幸,一些志同道合的朋友加入了进来,他们被 OpenCat 的愿景所吸引,也愿意和我一起,把这个梦想变成现实。于是,我们的故事开始了。Bittle,对我们来说,是一次全面的技术飞跃,一次从“原型”到“艺术品”的蜕变,也是我们团队协作,共同克服无数困难的里程碑。
为了将 Bittle 推向市场,我们再次选择了众筹。2020年10月,Bittle 在 Kickstarter 上成功筹集了 567,218 美元,获得了 2,052 位支持者的鼎力相助。这次众筹的巨大成功,不仅为 Bittle 的量产提供了充足的资金,更重要的是,它向我们证明了,OpenCat 的理念和产品,在全球范围内都拥有广阔的市场和热情的支持者。
坚韧的骨骼与灵动的肌肉:从经验中汲取的设计智慧,赋予生命感
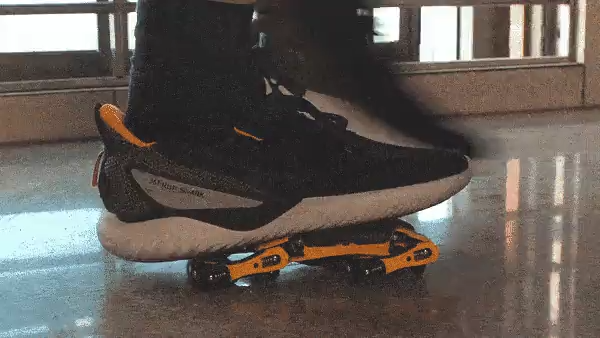
首先是身体。我们放弃了木头,选择了高强度注塑塑料。这不仅仅是为了美观,更是为了让它更耐用、更抗摔。Nybble 的木头框架在多次测试中暴露出脆弱的一面,我们从这些“磨难”中吸取教训,决定用更坚固的材料。我特别喜欢它的互锁式 3D 拼图设计,螺丝用得很少,组装起来就像玩乐高,一个小时就能拼好。这种“设计巧思”不仅简化了组装,降低了用户门槛,也让它拥有了更精致的“外壳”,更接近有生命感的宠物。它甚至能承受一个成年人的踩踏而毫发无损(当然,别真的去试!)。
我们也为 Bittle 设计了弹簧加载的大腿。这是个小小的巧思,却能大大延长舵机的寿命。舵机在四足机器人里是易损件,Nybble 时代我们没少为它头疼。现在,就像给关节加了减震器,缓冲了运动中的冲击,让它的步态更平稳、更自然。这种仿生设计,不仅保护了核心部件,也让 Bittle 的动作更加流畅,更具“生命感”。而且,我们还设置了一些“弱链” 。万一真的遇到极端情况,它会在这里“解体”,而不是损坏昂贵的核心部件。这些“薄弱环节”很容易重新安装或更换,成本也很低廉,这都是为了让它更“好养活”,让用户能更放心地去探索。
驱动 Bittle 运动的,是九个 P1S 舵机。八个用于行走关节,一个用于头部平移。这些 P1S 舵机,除了速度快、控制范围广,还有一个关键的进步:它们集成了位置反馈功能。这意味着机器人不再是‘盲目’地执行指令,它能实时‘知道’每个关节的实际位置。如果遇到障碍或者没有达到预设位置,它能立刻感知并进行调整,这对于实现更平稳、更精确、更可靠的动态运动至关重要。想象一下,它能更精准地保持平衡,甚至在不平坦的地面上也能稳健行走,这让它的动作更具‘生命力’。
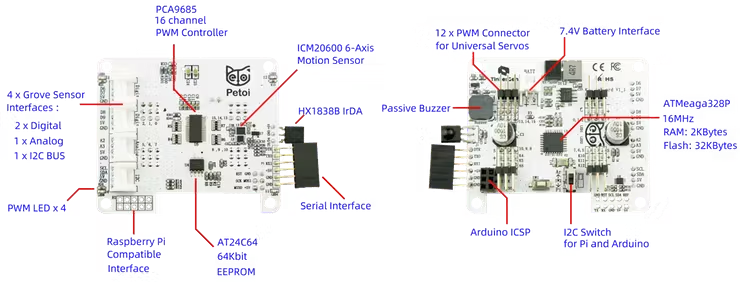
智慧的心脏:NyBoard V1 与 BiBoard 的崛起——我们对性能的极致追求与平价的平衡
如果说 Nybble 的 Arduino Pro Mini 是个“初级大脑”,那 Bittle 的 NyBoard V1 就是我们为它量身定制的“智慧心脏”。它依然基于 Atmega328P 芯片,但我们把更多功能集成到了这块定制板上。
NyBoard V1
我们给它加了 8K 的 I2C EEPROM,专门用于存储“肌肉记忆”数据。更重要的是,我们集成了 IMU(惯性测量单元)。这就像是 Bittle 的“平衡感”,能实时感知身体的姿态、方向和加速度,这对维持它的动态平衡至关重要。
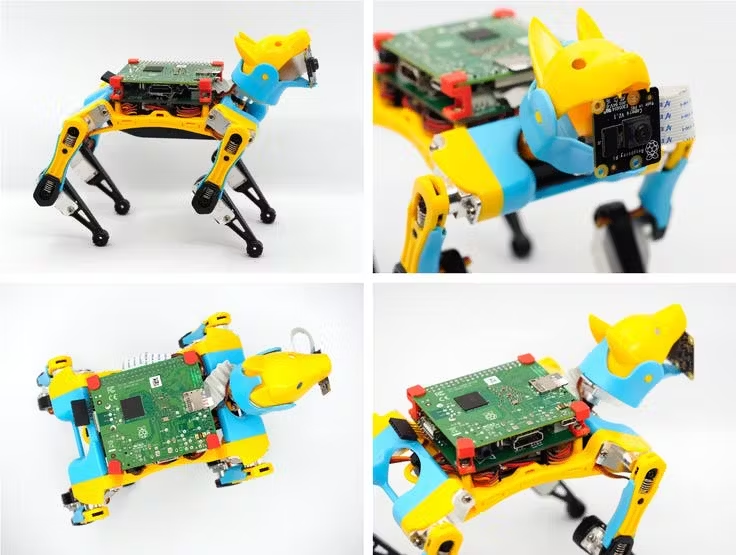
NyBoard V1 还预留了一个 2x5 的插座,专门用于安装树莓派等上位机。这意味着,你可以轻松地给 Bittle 注入人工智能的“灵魂”,让它能进行更复杂的感知和决策。此外,还有四个 Seeed Grove 插座,这就像是给 Bittle 留下了无限的“感官扩展”接口。它的头部甚至设计成一个夹子,可以方便地夹住这些模块,实现快速的传感器集成。
Bittle连接树莓派3 A+和相机
随着项目的发展,我们对主控板的性能有了更高的追求。我们深知,要实现更复杂的智能和更流畅的动作,必须有更强大的“心脏”。于是,BiBoard 系列应运而生,它标志着 OpenCat 硬件的又一次飞跃,也是我们团队攻克无数技术难关的结晶。
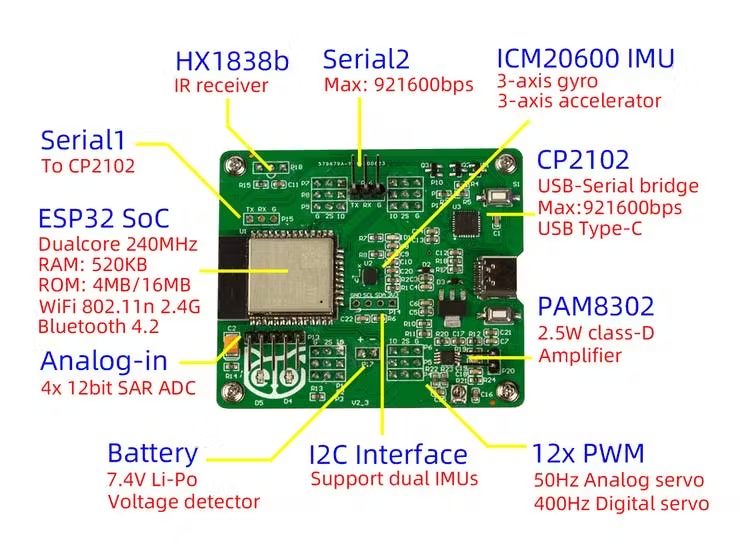
BiBoard V0 ,基于ESP32
BiBoard V0 的出现是一个关键发展,最初作为功能性测试版本面向开发者。它基于高性能的 ESP32 芯片构建,拥有强大的 240MHz 双核 CPU,辅以 520KB SRAM 和高达 16MB 的大容量闪存。与 NyBoard 相比,计算资源的显著增加使得更复杂的算法和更大的代码库能够直接在主板上运行。BiBoard V0 的一个关键进步是集成了内置的 WiFi 和蓝牙模块,以及音频放大器和扬声器。这意味着,许多之前需要外部模块或树莓派才能实现的功能,现在可以直接在主板上完成,大大简化了硬件设置,也让机器人更加独立和响应迅速。这种集成度提升,在保证“生命感”所需复杂功能的同时,也进一步控制了整体成本,体现了“平价”的理念。
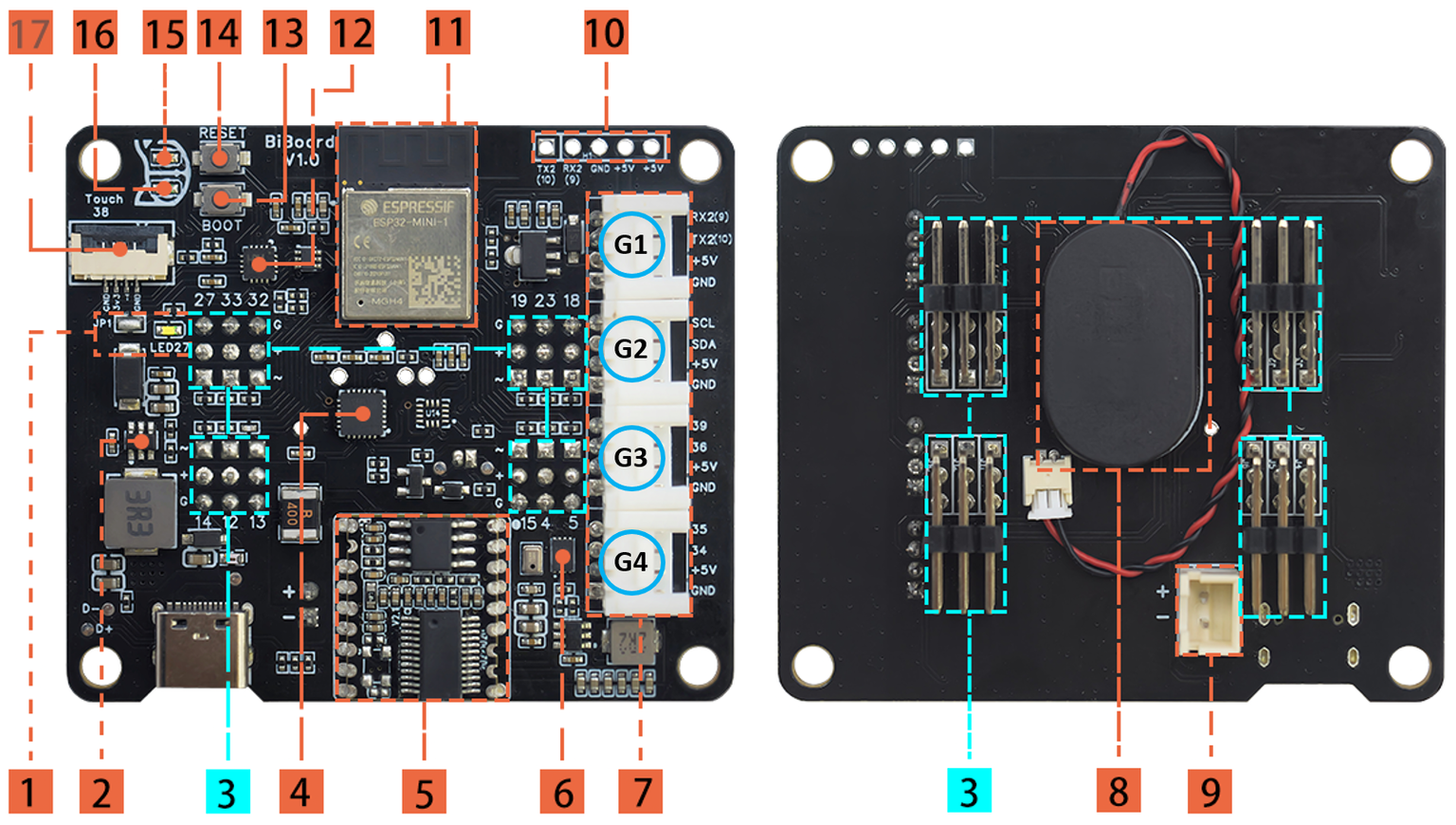
BiBoard V1
BiBoard V1 最令人兴奋的特性之一,是它包含了“支持双语多词的独立智能语音识别” 。这意味着,机器人现在能更细致地理解你的语音指令,并用清晰的声音回应你,甚至无需外部模块就能实现复杂的语音交互。这背后是我们团队在语音识别算法和硬件集成上付出的巨大努力,让机器人拥有了更自然的“听”和“说”的能力,极大地增强了它的“生命感”。此外,它还支持4个电容式触摸板,增强了产品的互动性。
尽管板载智能显著增强,BiBoard V1 仍明确增强了对树莓派 3A+、4 和 5 等强大外部 AI 计算平台的兼容性。这种平衡的设计策略,确保了机器人开箱即用就具备高能力,同时仍然是用于AI 开发的灵活平台。
以下表格对比了两代主控板的核心技术参数:
|
特性
|
NyBoard V1
|
BiBoard V0 (开发者测试版)
|
BiBoard V1 (生产版)
|
|
控制器芯片
|
Atmega328P
|
ESP32
|
ESP32-mini
|
|
CPU 速度
|
16MHz
|
240MHz 双核
|
240MHz 双核
|
|
SRAM
|
2KB
|
520KB
|
520KB
|
|
闪存
|
32KB
|
高达 16MB
|
4MB
|
|
集成无线
|
无 (可加扩展模块)
|
WiFi/蓝牙
|
WiFi/蓝牙
|
|
集成音频
|
蜂鸣器
|
音频放大器/扬声器
|
高保真扬声器
|
|
语音识别
|
无 (可加模块)
|
扩展Hat
|
板载
|
|
树莓派接口
|
2x5 插座
|
留有接口
|
2x5 插座 (支持 Pi 3A+, 4, 5)
|
|
可扩展插座
|
4 个 板载Grove
|
4个扩展板上的Grove
|
4个板载 Grove
|
|
USB 端口
|
Mini-USB
|
USB Type-C
|
USB Type-C [13, 14]
|
灵动的双眼与无限的可能:传感器的世界——让它感知我的世界
IMU(惯性测量单元)作为所有主板迭代(包括 NyBoard V1 和随后的 BiBoard 系列)的基本组件,都集成其中 。它对于维持机器人的平衡不可或缺,尤其是在动态和复杂运动期间。它的数据被积极利用来检测机器人何时倒置,从而允许采取纠正措施,并可以微调身体角度调整和稳定性控制,让它在各种复杂动作中都能保持优雅,这无疑是赋予它“生命感”的关键一步。借助于陀螺仪的快速反馈,我们实现了机器人在单杠上的连续翻滚,从平地翻转站上天花板,以及在舵机四足机器人上全球首次后空翻和连续后空翻。
除了核心的 IMU,我们还为 Bittle 准备了一系列丰富的“感官”扩展,让它能更全面地感知并与环境互动,真正融入我们的生活:
-
智能摄像头模块(MU Camera):它能利用深度学习算法识别色块、球、人体和特定卡片。所有算法都在设备上本地处理,最大限度地减少了主控制器的延迟和计算负载,让 Bittle 拥有了“眼睛”,能看懂它面前的世界。
-
Petoi AI 视觉模块:作为视觉感知方面更先进的飞跃,它基于 Arm Cortex-M55 和 Ethos-U55 嵌入式视觉模块构建,Ethos-U55 是一种专用的微型 NPU,提供 64 到 512 GOP/s 的强大算力。这意味着,更复杂的机器学习推理可以直接在机器人“边缘”进行,无需依赖外部强大的电脑,让机器人的视觉感知和响应更加实时、智能,这让它的“生命感”更上一层楼。
-
超声波传感器:它能像蝙蝠一样探测距离,帮助机器人避开障碍物,实现更安全的导航。
-
光线传感器:让 Bittle 能感知环境光线的强弱,甚至可以实现“追光”或“避光”的行为。
-
触摸传感器:当你的手指靠近它时,它能通过电容变化感知到,实现更自然的物理交互。
-
手势传感器:让 Bittle 能识别你的手势,比如“向上”、“向下”、“向左”、“向右”,甚至更复杂的多方向手势,实现直观的非接触式控制。
-
PIR 运动传感器:它能检测到范围内的运动,通常是人类的运动,让机器人能感知到你的到来并做出反应。
-
红外距离传感器:通过反射红外光来测量距离,特别适合物体跟踪或循线等应用。
-
语音指令模块:它让机器人能听懂你的声音,无需唤醒词,支持中英文,甚至可以自定义指令,让交互变得无比自然和流畅。
-
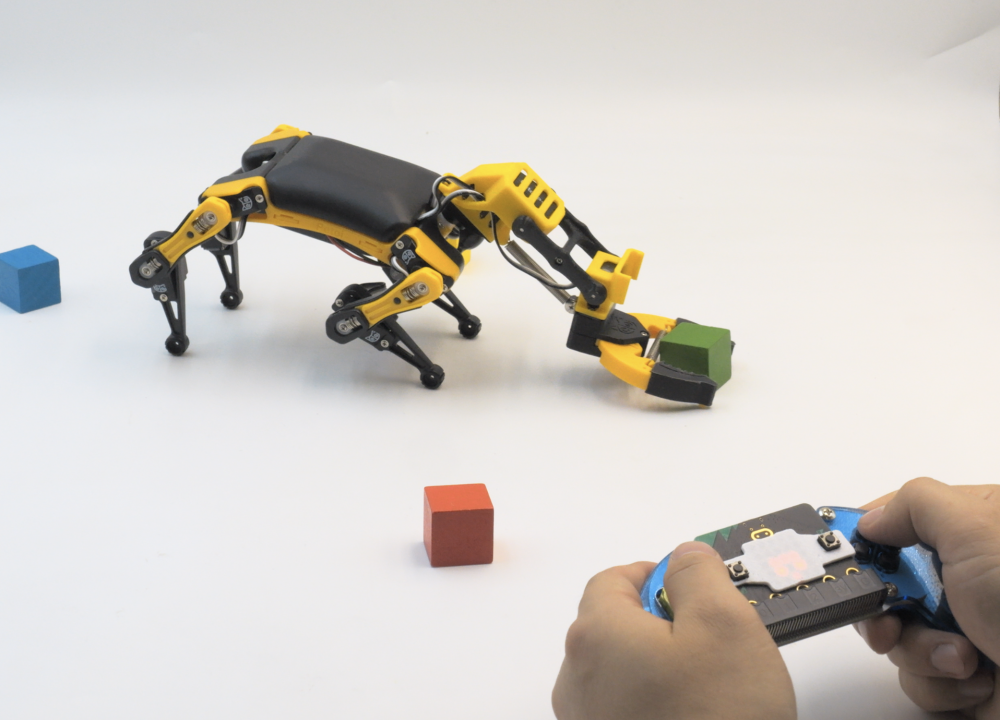
三自由度机械爪:它可以接插上述扩展模块,并能实现在1秒内连续3次开合捕获物体。
这些多样化的传感器,让 Bittle 不再只是一个执行命令的机器,它能更全面地感知世界,并以更自然的方式与我们互动,真正变得“有血有肉”。
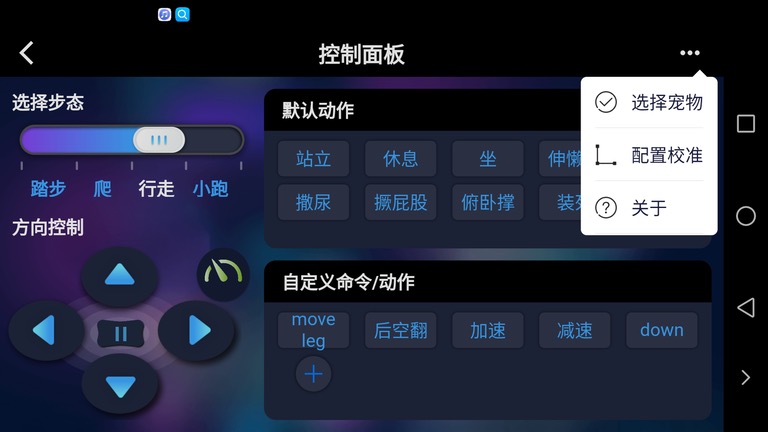
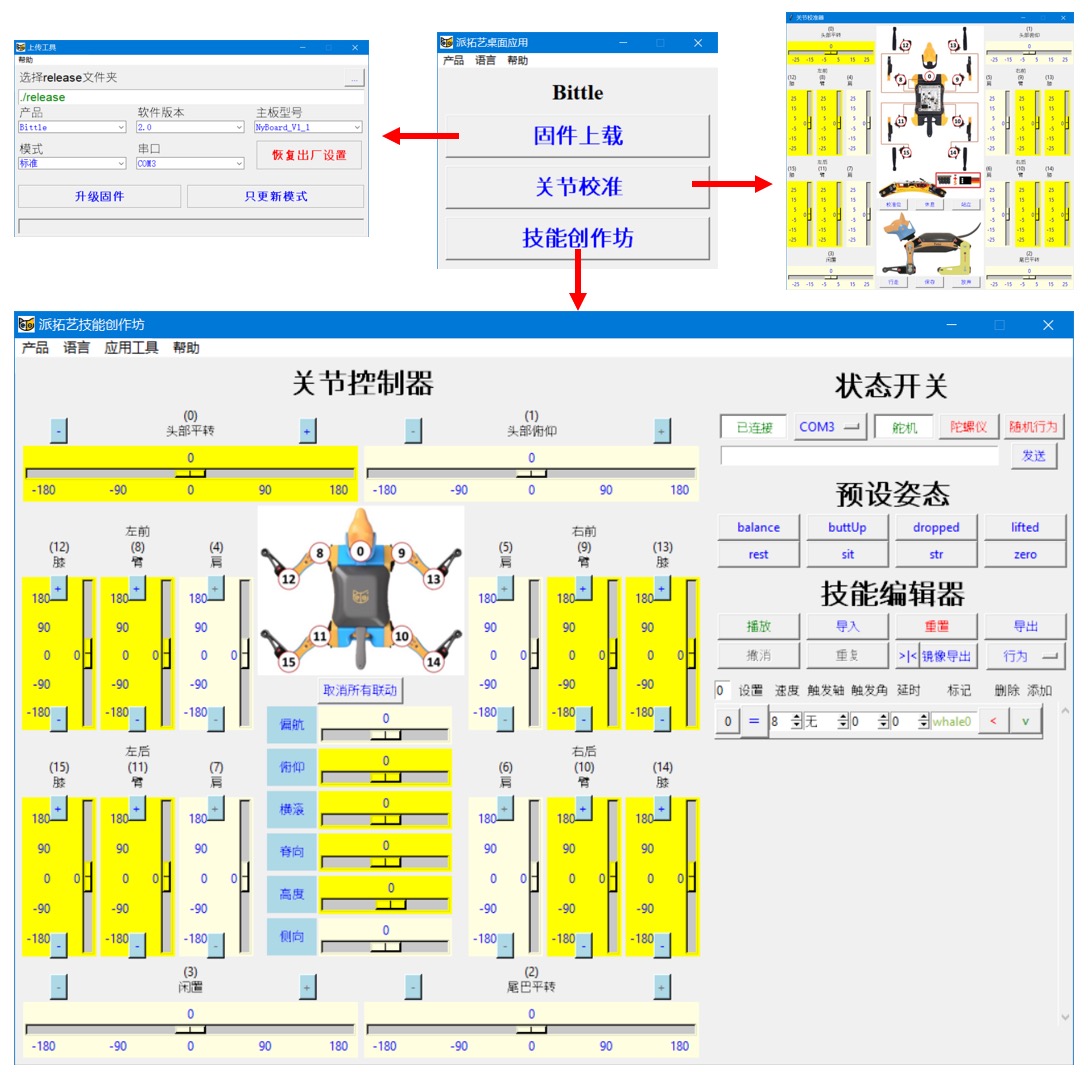
多维度的交互与编程:让智能触手可及——我的坚持与分享
我们一直致力于让 OpenCat 的控制和编程变得简单而强大,满足从初学者到专业开发者的所有需求。这其中,有我最初的坚持,也有团队伙伴们共同的努力和智慧。
-
语音指令:让它听懂你的心声
-
我一直梦想着能和机器人像和宠物一样自然地交流。语音指令模块就是我们实现这一梦想的关键一步。我们砍掉了唤醒词,你不用喊“嘿,Bittle”,直接说出指令它就能听懂,这让交互变得无比流畅和自然。
-
它支持 40 个预设的英语和中文指令,更棒的是,你还可以录制多达 10 个自定义指令,每个最多六个音节,让你的机器人拥有独一无二的“口令“。
-
在 NyBoard 时代,它通过 Grove 接口连接。但随着 BiBoard 的到来,特别是 BiBoard V1,语音识别功能已经深度集成到主板上,实现了支持双语多词的独立智能语音识别,还有10个可由用户录制的开放指令。这意味着,机器人能更精准地理解你的指令,并用清晰的声音回应你,甚至无需外部模块就能实现复杂的语音交互,极大地增强了它的“生命感”。
-
手柄与游戏手柄:指尖的舞动
-
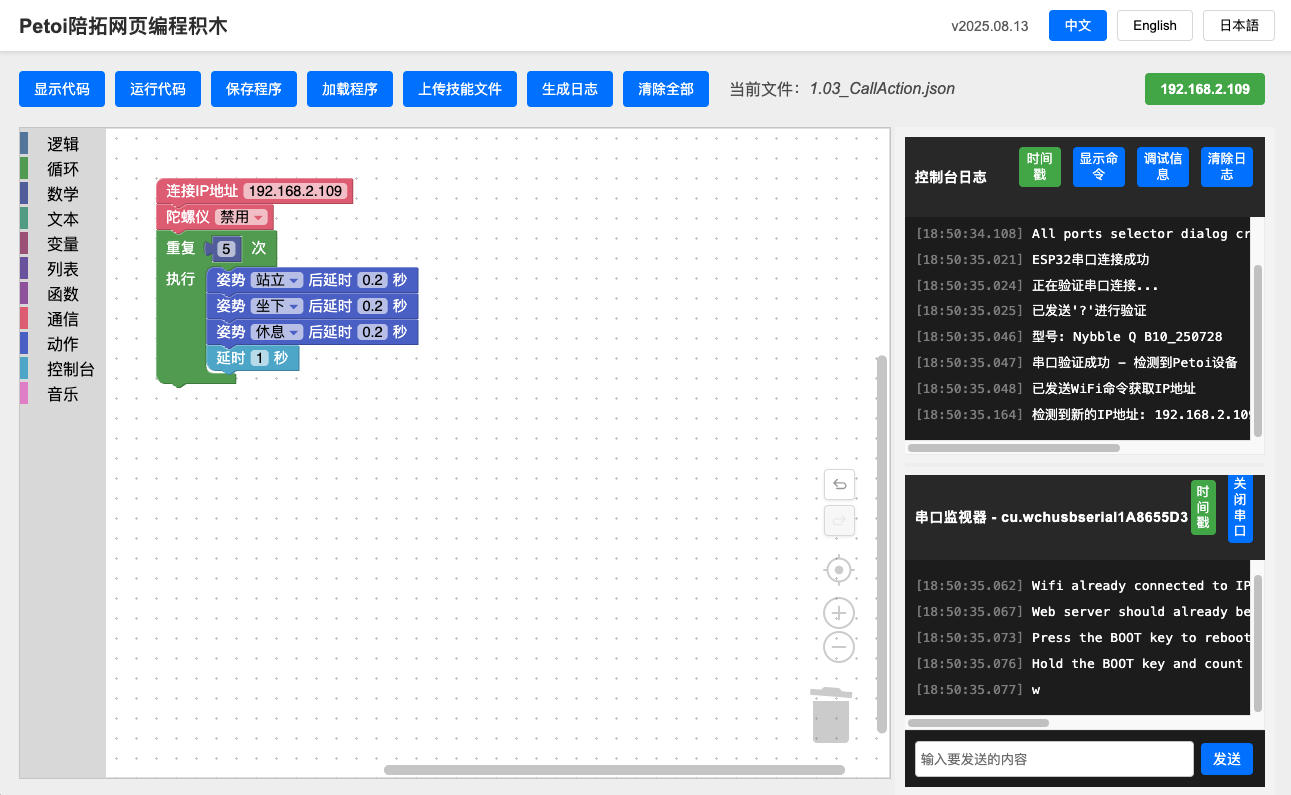
编程积木:人人都是创造者
-
文本编程:深度定制与无限可能
-
课程与教育资源:知识的灯塔
展望:与你同行,共创未来——我的梦想与我们的征途
从 Nybble 的木质骨架到 Bittle 的智能身躯,OpenCat 的每一步都凝聚了我们无数的心血和汗水。这七八年走来,有孤独的探索,有团队的并肩作战,有成功的喜悦,也有无数次跌倒再爬起来的磨砺。它不再仅仅是一个机器人,它是一个平台,一个梦想的载体。它证明了,开源的力量,能够让复杂的机器人技术变得触手可及。
如今,我们的 OpenCat 机器人已经通过 Petoi.com 官方商店 和 **Amazon(美国、加拿大、墨西哥站点)** 面向全球销售。无论是 Bittle、Bittle X 还是 Nybble Q,以及各种配件和传感器,我们都建立了稳定的生产线,确保这些经济实惠的机器人套件能送达世界各地的爱好者手中 [3, 37]。看到它们被应用于教育、研究,甚至成为家庭中的一员,我感到无比欣慰。
我们诚挚地邀请你,造物社区的每一位成员,加入到 OpenCat 的旅程中来。无论你是代码高手,还是创意无限的设计师,亦或是刚刚踏入机器人世界的新手,你的每一次贡献,无论是代码、教程、创意,还是仅仅是分享你的使用经验,都将成为推动 OpenCat 持续发展的强大动力。因为,OpenCat 的成功,离不开每一个像你一样,对创造充满热情的人。
未来,我们看到 OpenCat 能够集成更强大的边缘 AI 芯片,拥有更精准的视觉和更智能的决策能力;我们梦想它能实现更精细、更仿生的运动,在各种复杂地形上自由穿梭;我们期待它能连接更多奇妙的传感器,感知更丰富的世界。
OpenCat 的故事,才刚刚开始。让我们一起,用代码和创意,继续书写这个关于机器生命、关于创造、关于分享的篇章。
期待在社区里与你相遇!
8 月 28 日,开源中国源创会(以及 IOTE 国际物联网展会)将会举办,届时 OpenCat 会在线下与大家相见,可编程机器猫将与你互动,看完本文,如果你感兴趣欢迎到活动现场玩耍!
⏰活动时间:8 月 28 日 (周 4️⃣) 14:00 - 17:00
🏠地点:深圳・国际会展中心 (宝安) 11 号馆・会场五