本文分享自华为云社区《自动驾驶(AIOT) - 轻量级目标检测与分割算法开发和部署(RK3568)【玩转华为云】》,作者:HouYanSong。
本文将在ModelArts平台上开发轻量级目标检测与分割算法,并使用ModelBox框架在RK3568开发板上实现模型推理和部署。
![cke_145.jpeg]()
数据准备
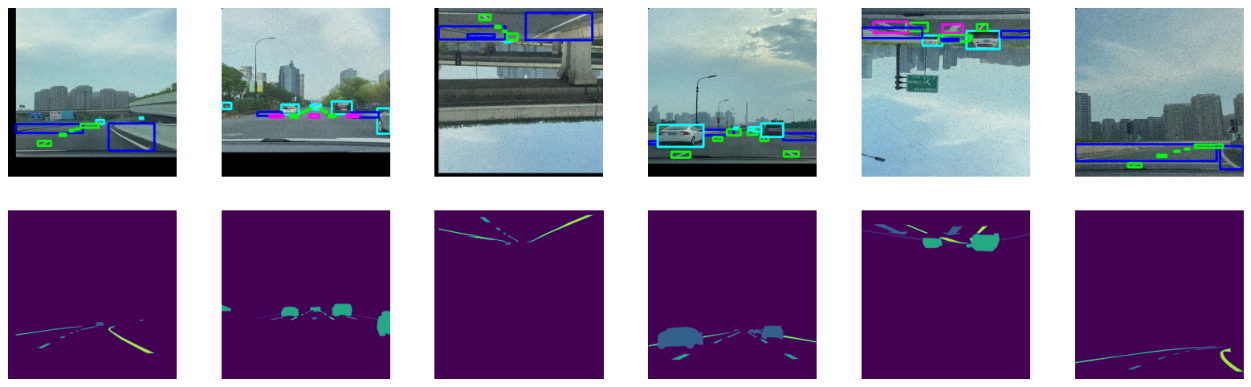
我们收集了一份200张由Labelme标注的道路图像分割数据集,之后使用脚本将其转换为VOC格式的数据集并进行数据增强:
![cke_146.png]()
处理好的数据集已经分享到AI Gallery上,可以使用OBS下载:
![cke_147.png]()
算法简介
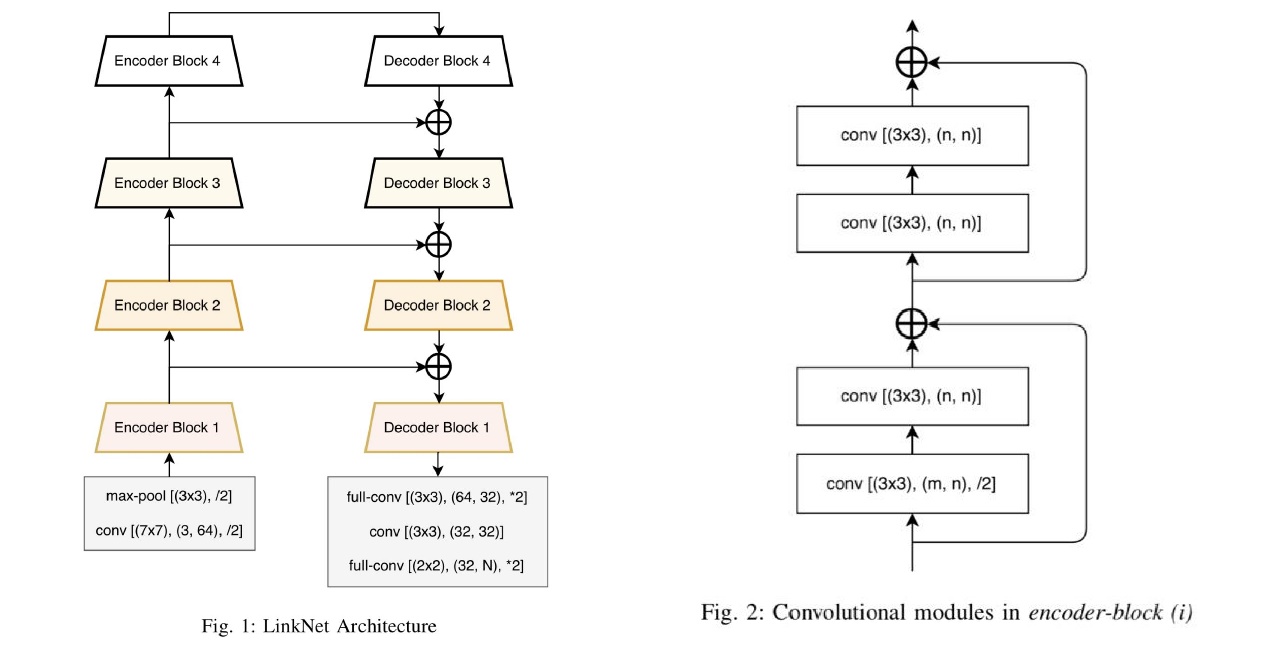
像素级的图像分割不仅需要精确,有时还需要高效以便应用到real-time application比如自动驾驶汽车等。现有的方法可能精度较高但往往参数量巨大,为了解决这个问题,我们使用LinkNet作为主干网络[Fig. 1],中间层[Fig. 2]使用LeakyRelu进行激活,最后一层使用Sigmoid做归一化,并在Encoder Block 4后增添目标检测分支,训练过程中进行梯度裁剪防止梯度爆炸。
![cke_148.jpeg]()
云端训练
算法详情可以运行我发布的Notebook,并下载转换好的模型文件:
![cke_149.png]()
ONNXRuntime推理:
下载yolo_tf_seg.zip并解压到本地,之后安装opencv、numpy、onnxruntime即可一键运行。
端侧推理
![cke_150.jpeg]()
1、我们在VS Code中使用Remote-SSH远程连接ModelBox端云协同AI开发套件(RK3568):
![cke_151.png]()
2、在SDK目录下使用create.py脚本创建工程object_detection_seg(od_seg):
![cke_152.png]()
3、创建推理功能单元yolo_tf_seg:
![cke_153.png]()
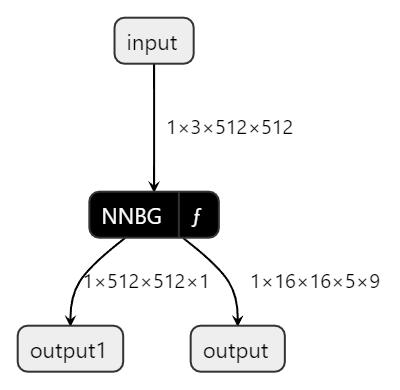
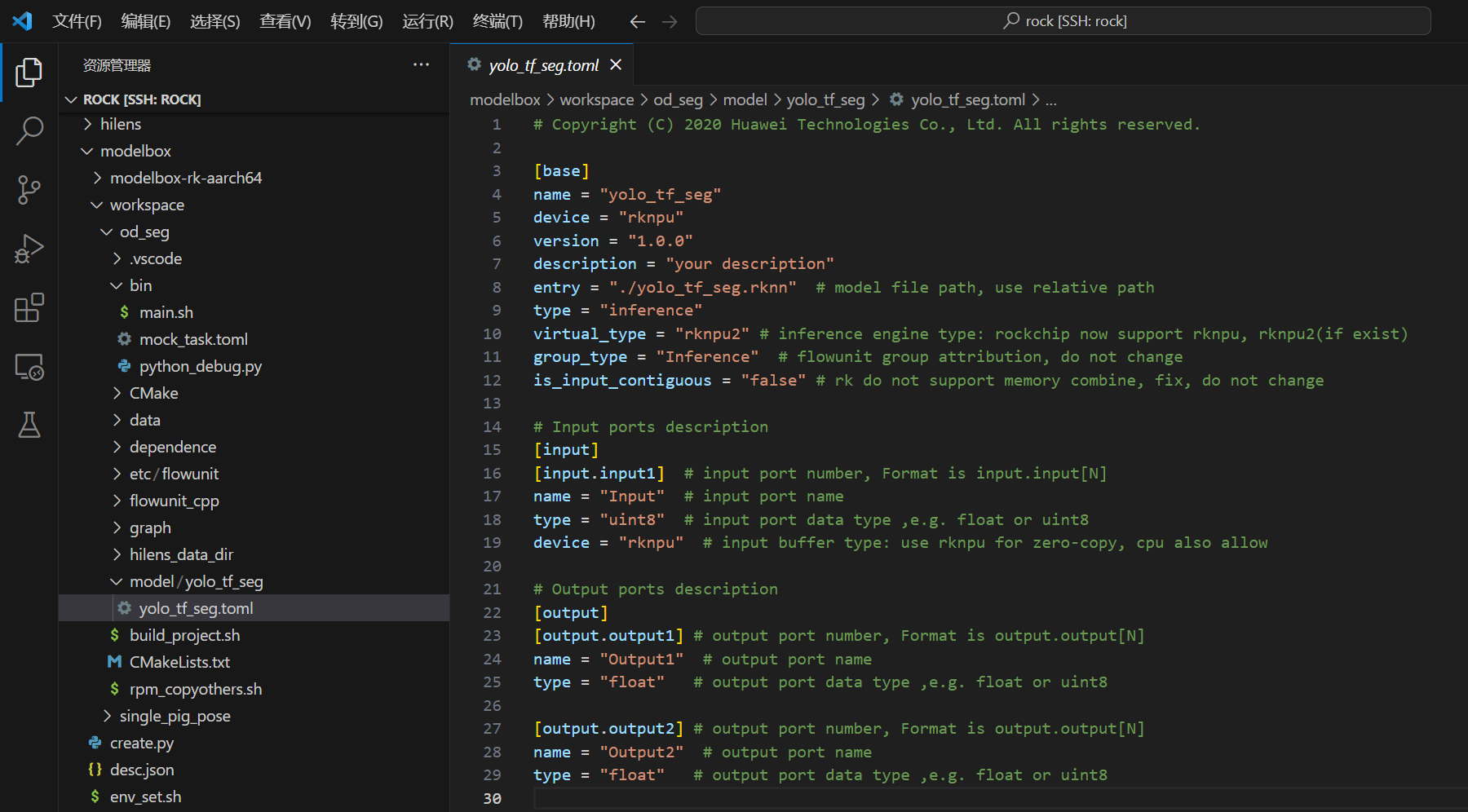
4、将转换好的模型放到yolo_tf_seg目录下,我们的模型有一个输入和两个输出:
![cke_154.png]()
修改配置文件如下:![cke_155.png]() 5、创建后处理功能单元post_process:
5、创建后处理功能单元post_process:
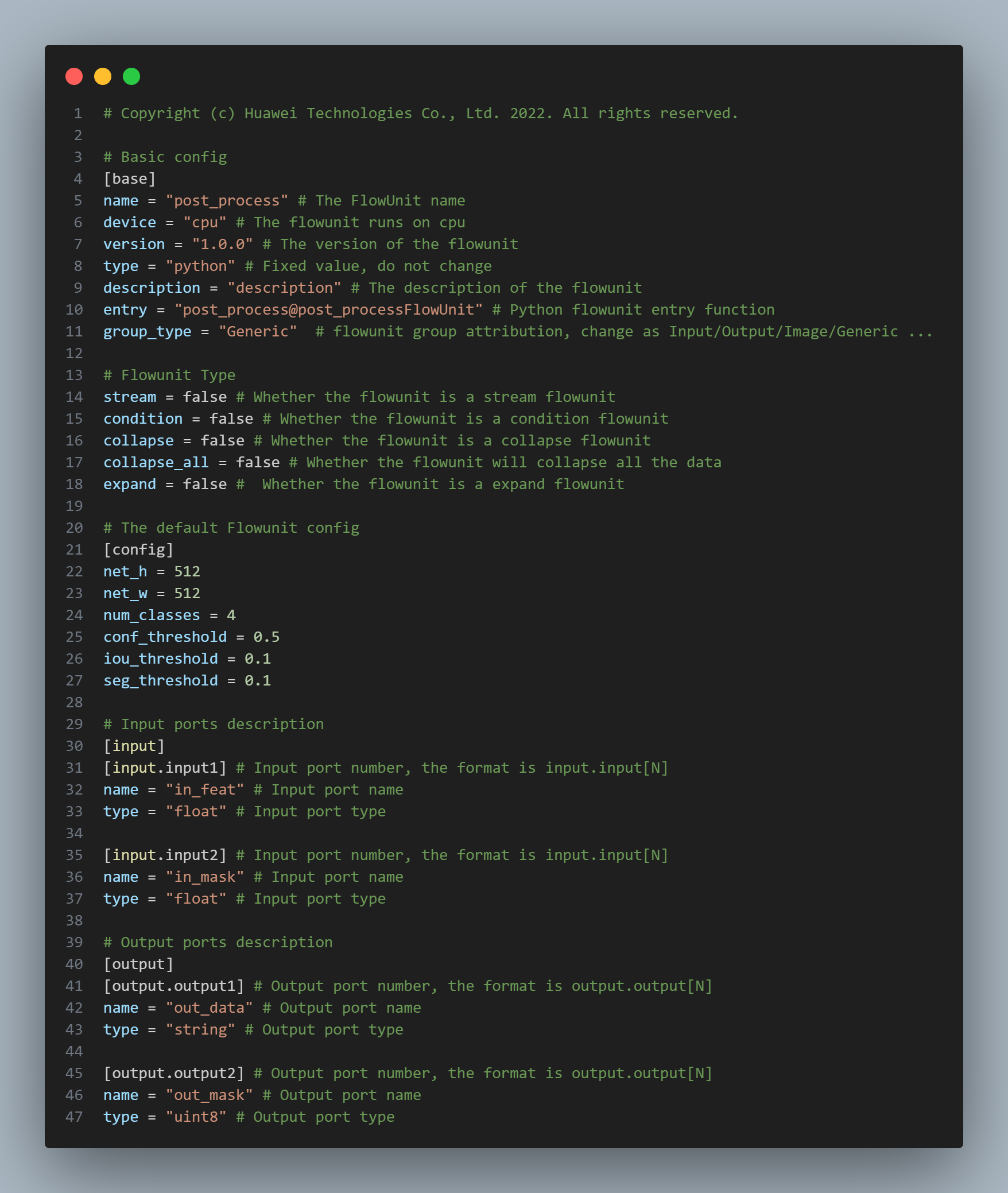
对于后处理功能单元,我们在config中配置参数,接收2个float类型的推理结果,返回类别检测框和图像掩码:
![cke_156.png]()
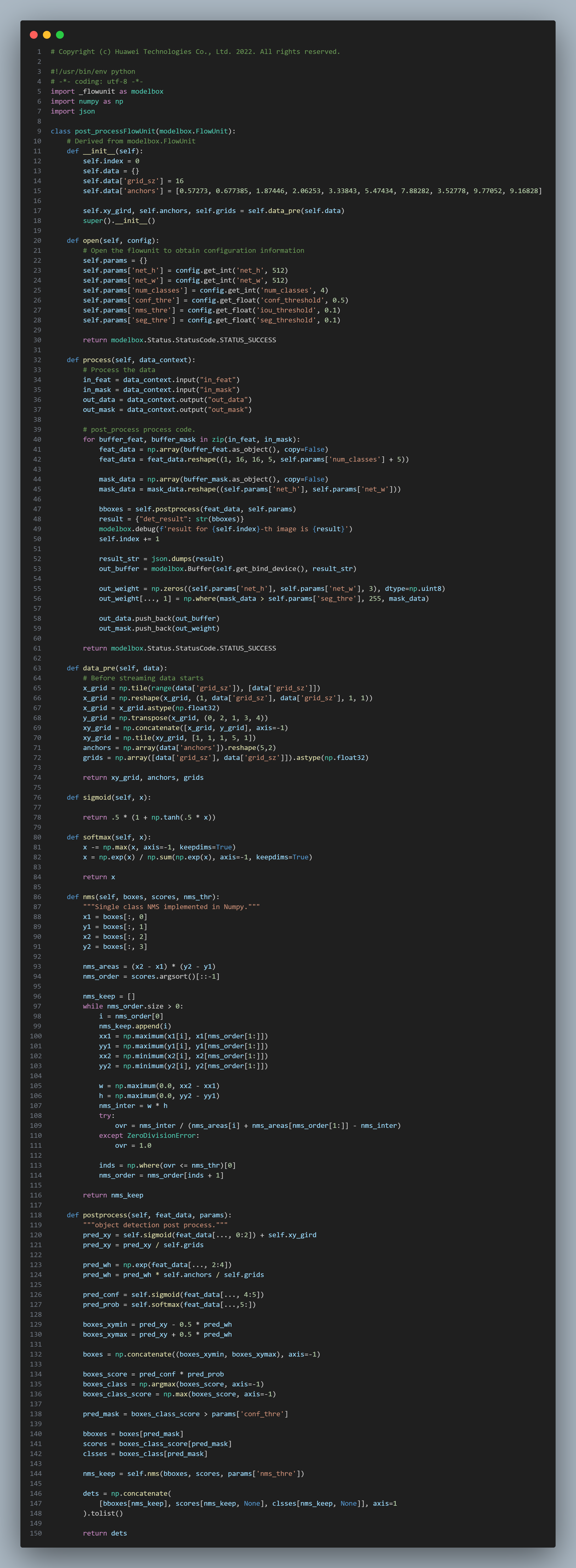
对应的逻辑代码如下:
![cke_157.png]()
6、创建绘图功能单元draw_image:
![cke_158.png]()
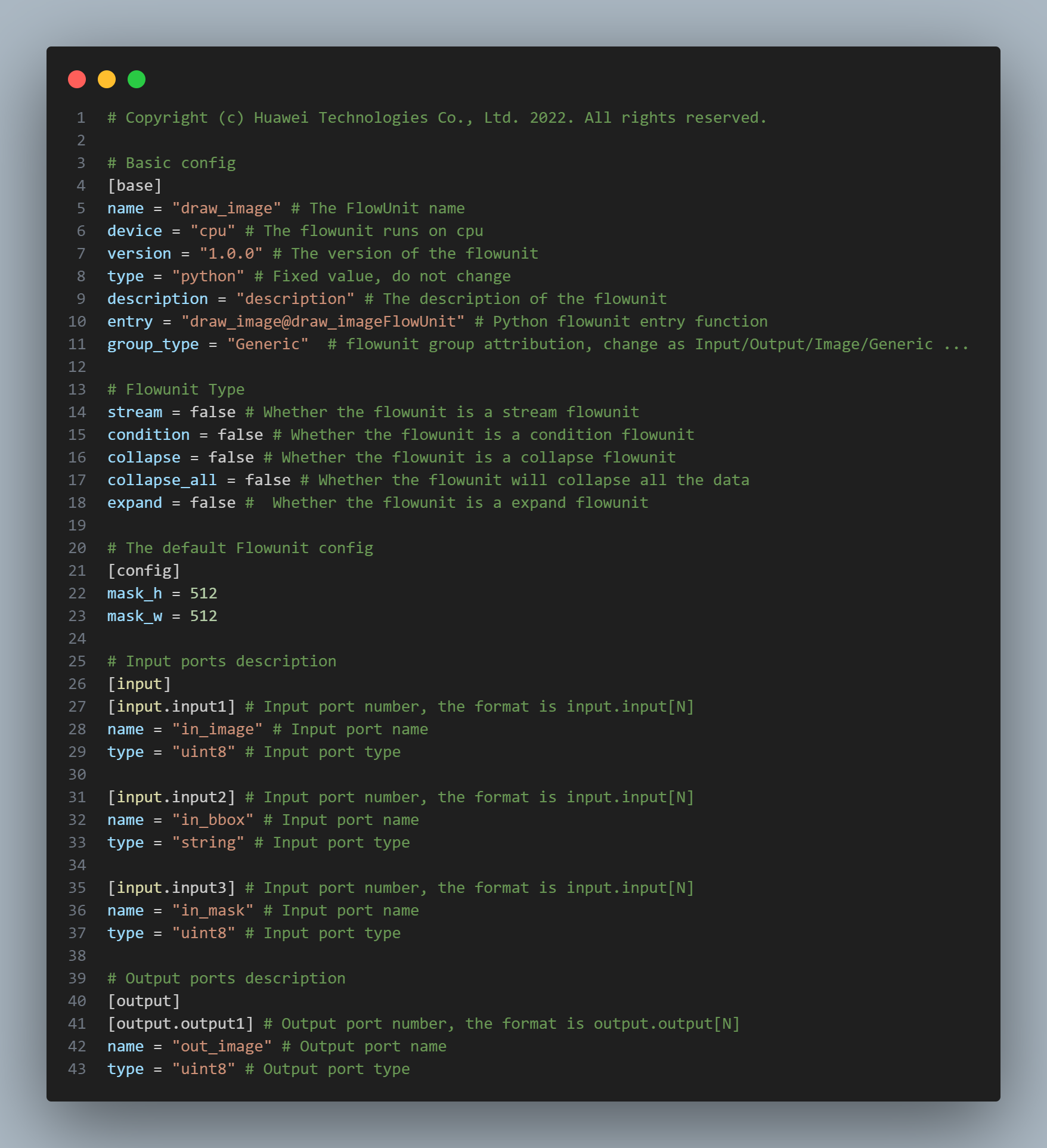
对于绘图功能单元,我们接收解码后的原始图像和目标检测框以及分割图像,对应的配置文件如下:
![cke_159.png]()
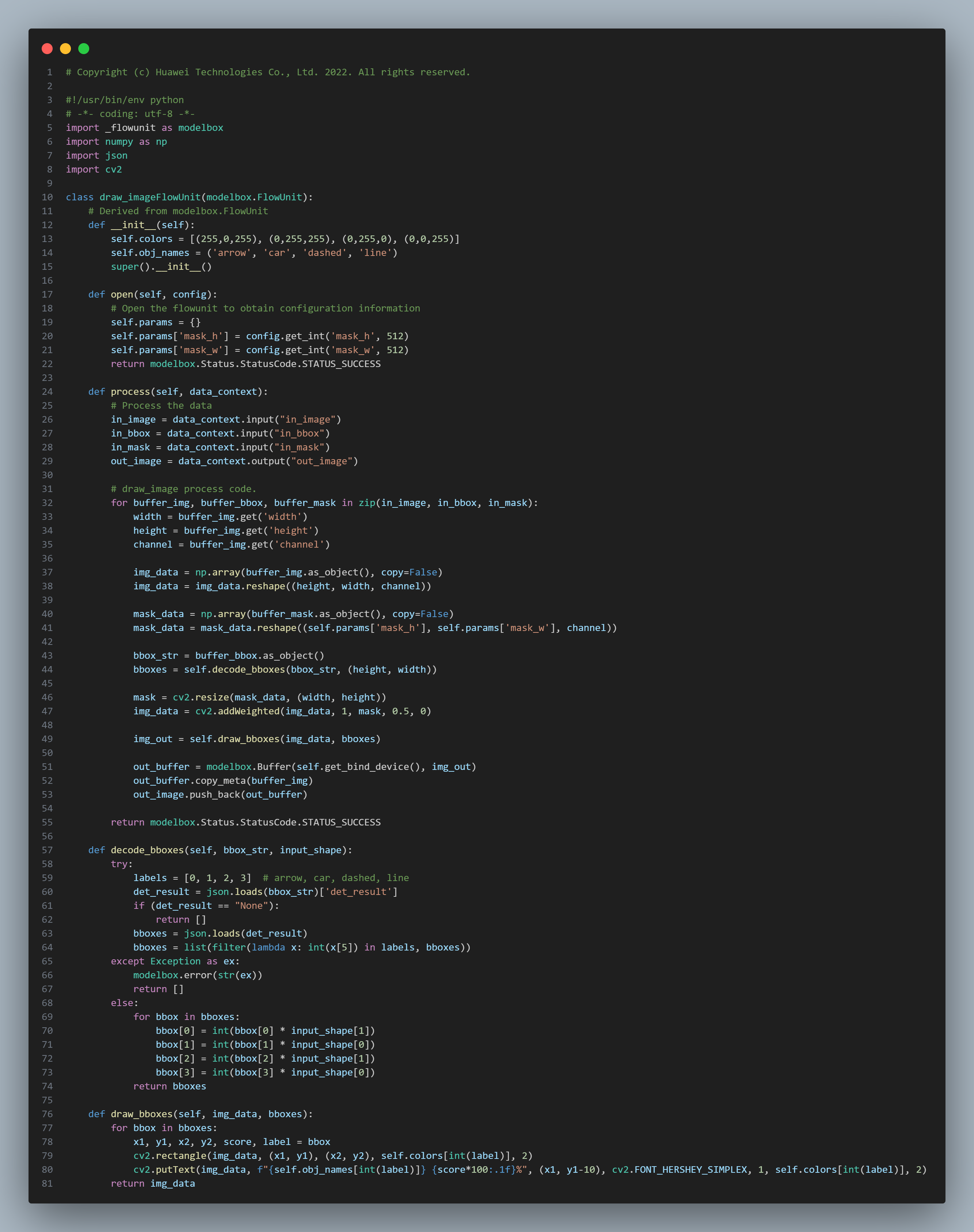
接下来补充逻辑代码生成新的图像:
![cke_160.png]()
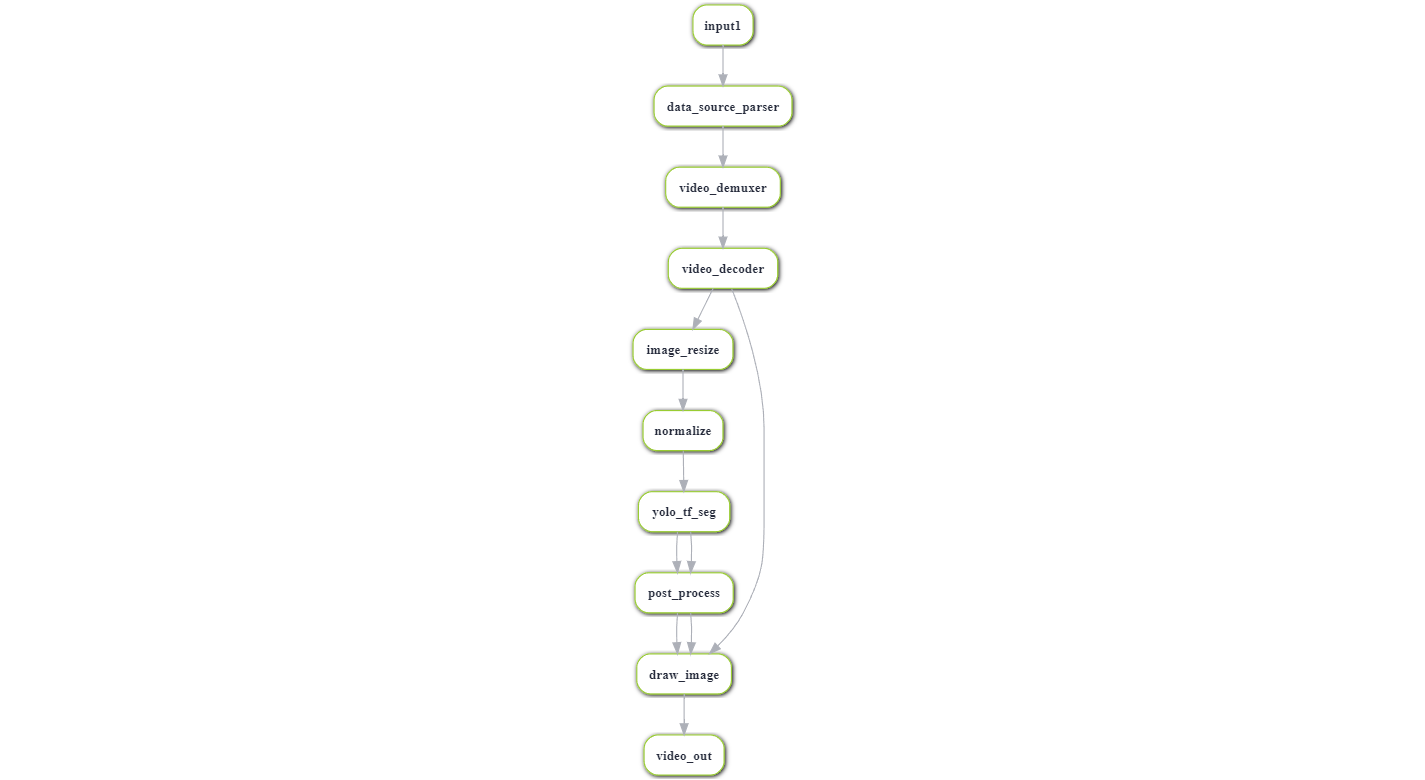
7、查看流程图:
![cke_161.png]()
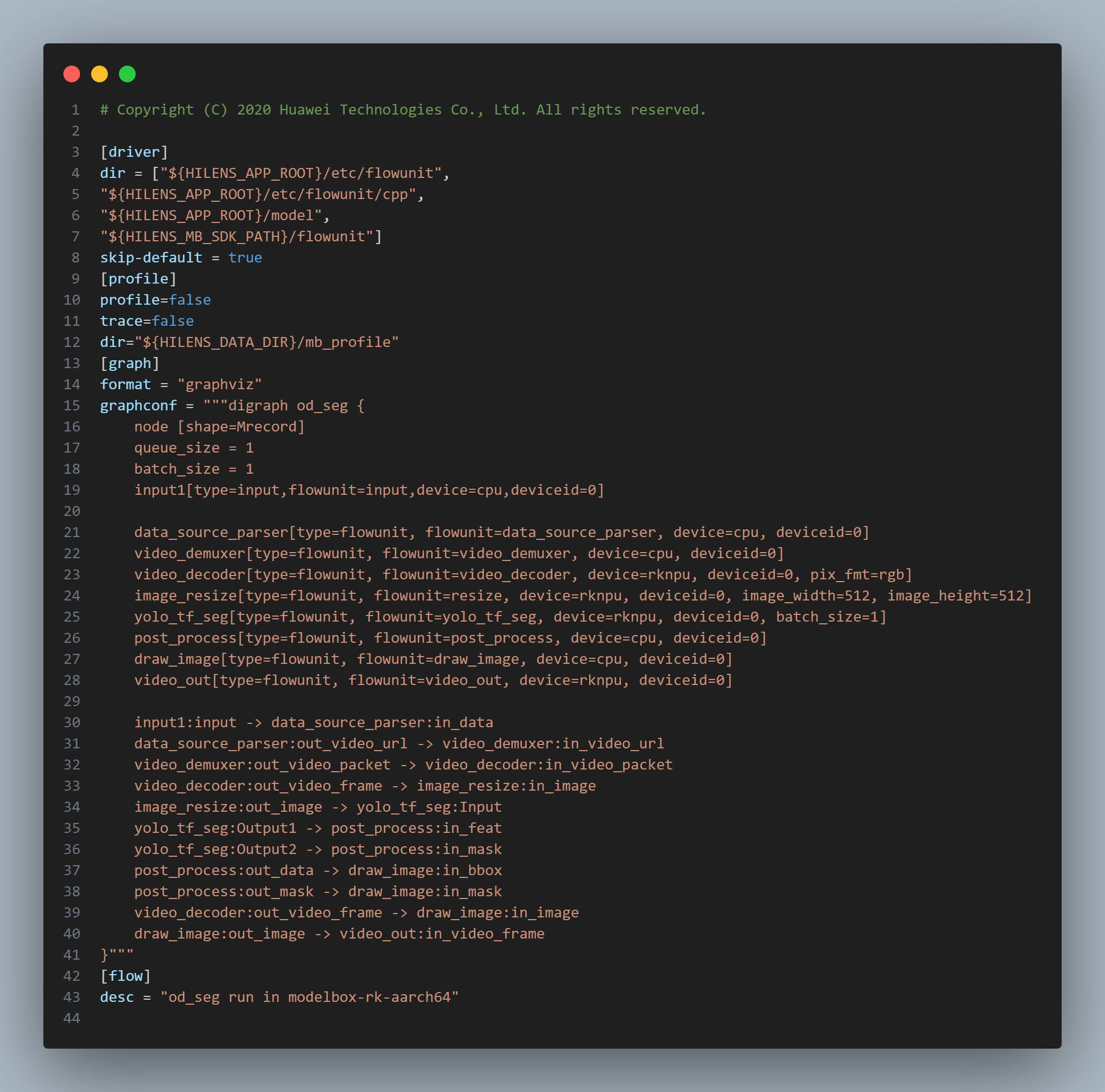
代码如下:
![cke_162.png]()
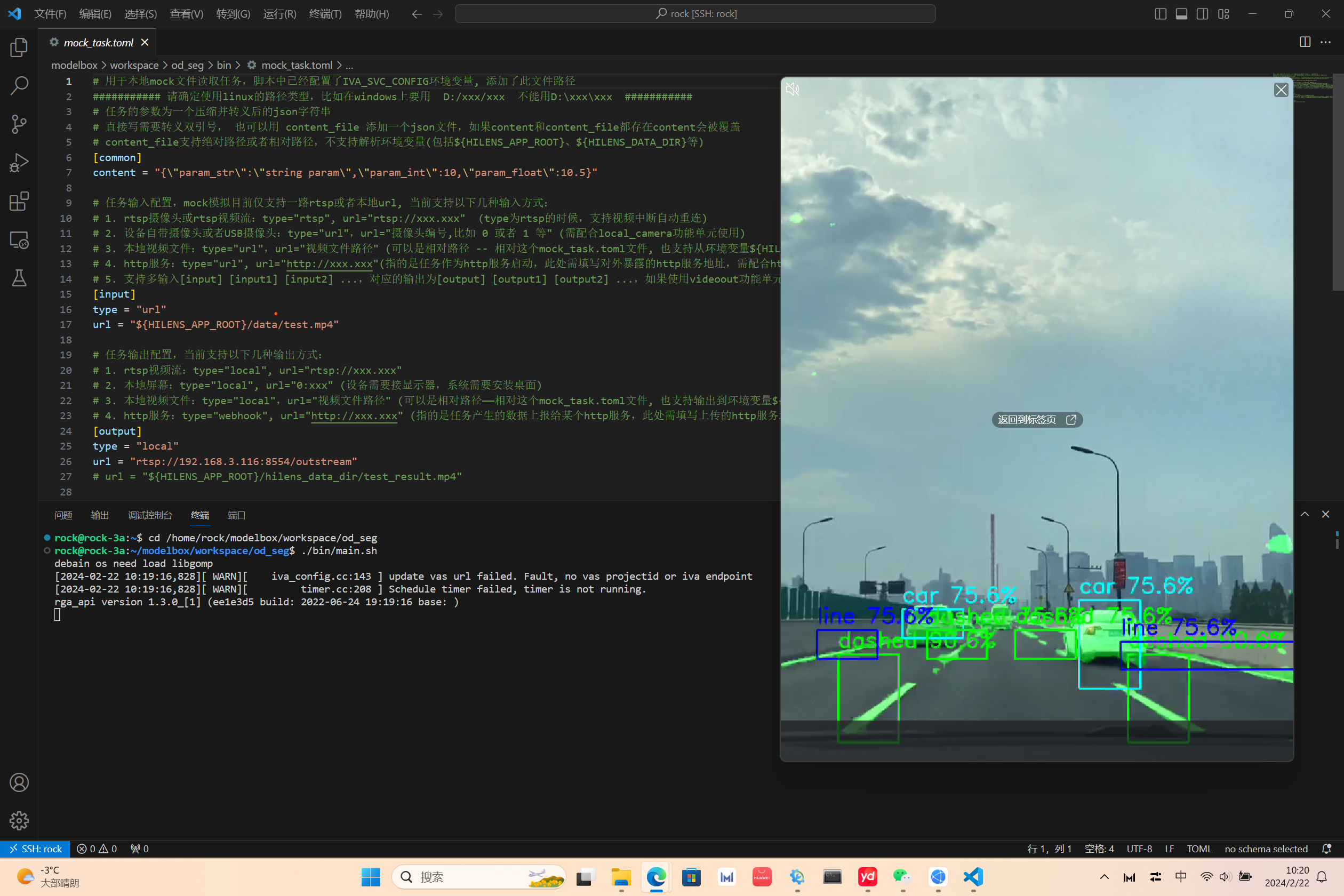
8、配置输入和输出,运行应用:
![cke_163.png]()
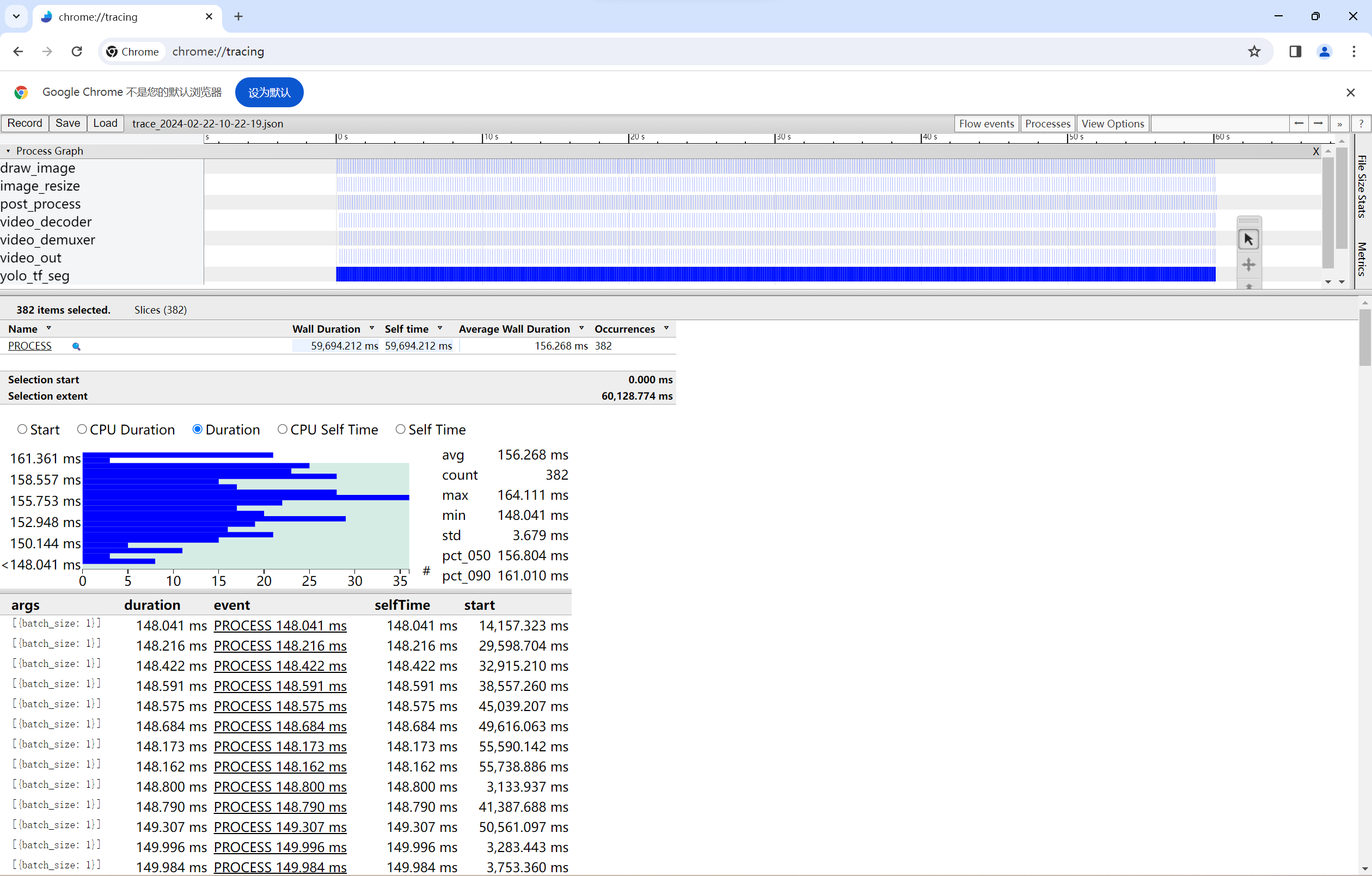
9、我们可以在Chrome浏览器chrome://tracing/中加载性能统计文件:
![cke_164.png]()
通过分析耗时最久的是推理功能单元,720p视频检测帧率在6fps左右。
小结:
本文总体而言并没有太多的创新点,是一个纯工程化的项目,主要工作是将学术界的优秀论文落地到边缘设备上,通过对网络的魔改,得到一个兼顾精度、速度和体积的目标检测和分割模型,在模型量化过程中会出现精度损失,后续会通过优化算法以及选择不同的量化算法kl_divergence(feature分布不均匀时可以得到较好的改善效果)继续提高模型的检测效果,复现本案例所需资源(代码、模型、测试数据等)均可从object_detection_seg.zip获取。
点击关注,第一时间了解华为云新鲜技术~



 5、创建后处理功能单元post_process:
5、创建后处理功能单元post_process: