deepwork 你的工作助手,增加多种文档解析器,复杂文档、图片混排全不怕
从 openclaw 开始,公司老板们经历了一场又一场的热潮,deepchat 也跟随升级为 deepwork,开始探索企业数字员工助手 本次更新: 提供多种文档解析器,复杂文档、图片混排全不怕
OpenCV 5 现已正式发布。公告称,这是自 2018 年 OpenCV 4 发布以来八年间最大的一次升级。
这次升级包含了无数开发者的贡献,其中下面三个单位系统性组织了开发:
OpenCV 5对中国开发者意味着什么
对中国开发者来说,OpenCV 5有几层特别现实的意义。
边缘设备更重要。中国有大量面向机器人、工业检测、智能安防、车载、消费电子和具身智能的视觉应用,部署环境经常不是标准服务器,而是ARM、Snapdragon、RISC-V、NPU等多种硬件。OpenCV 5重新整理HAL,对这类场景尤其关键。
现代模型部署更顺。大量科研和工程项目会把模型导出为ONNX,再接入C++或Python视觉流程。OpenCV 5提升ONNX覆盖率和动态shape支持,可以减少“模型训练好了,但部署时卡住”的情况。
OpenCV正在从传统CV扩展到“视觉系统底座”。未来一个视觉应用里,可能同时有传统图像处理、检测分割、视觉语言模型、几何重建和硬件加速。OpenCV 5的价值,不只是某个单点更强,而是让这些模块尽量在同一套工具链里协同工作。
参与开源社区的机会更清晰。OpenCV 5.x周期还会持续推进GPU DNN、非CPU HAL、更多模型与更多硬件支持。对高校、研究机构和企业开发者来说,这也是参与国际开源项目、提交patch、贡献测试和优化的好机会。
关于OpenCV 5
对很多开发者来说,OpenCV是“装上就能用”的底层工具:读图、变换、滤波、检测、跟踪、标定、拼接、部署,几乎每个视觉项目都会在某个环节碰到它。也正因为太常用,OpenCV的每一次大版本更新,都不只是库本身的事情,而会影响大量科研原型、工程系统和产业应用。
这一次的OpenCV 5,不是常规的小修小补。它针对近几年计算机视觉技术栈的变化做了一次系统性升级:深度学习模型越来越复杂,ONNX模型越来越常见,Transformer和大视觉模型进入生产环境,边缘设备和异构硬件越来越多,Python成为很多视觉开发者的第一入口。OpenCV 5正是面向这些变化而来。
OpenCV 5把“传统视觉工具箱”往“现代视觉应用底座”又推进了一大步。
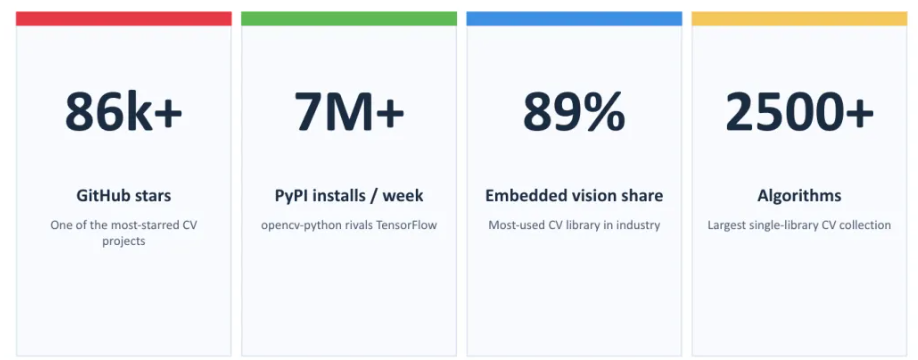
OpenCV关键统计数据
为什么需要OpenCV 5
从OpenCV 4到OpenCV 5,计算机视觉的开发环境已经变了很多。现在的视觉应用往往不再是“读一张图、跑一个传统算法”这么简单,而是把经典图像处理、深度学习、Transformer、大视觉模型、边缘部署、异构硬件和Python工作流混在一起。
开发者的期待也变了:同一套代码最好能在笔记本、服务器、嵌入式设备、ARM芯片、Snapdragon平台以及专用加速器上高效运行;一个从PyTorch导出的ONNX模型,最好能直接加载,而不是到处报算子不支持、动态shape不兼容。
OpenCV 5要解决的核心问题很明确:让核心库更快、更小,让API更干净,让DNN引擎跟上现代模型,让硬件加速路径更清晰,让3D视觉工具更好用,也让文档真正变得容易查。
最大的变化:全新的DNN引擎
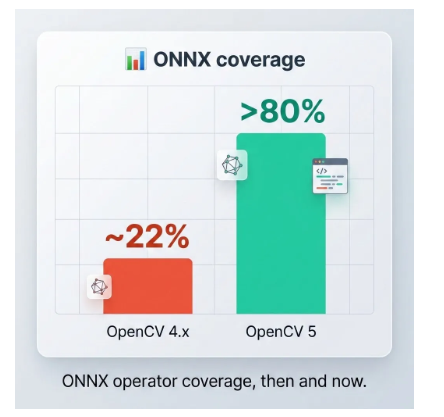
OpenCV 5最重要的变化,是DNN引擎重写。ONNX算子覆盖率:OpenCV 4.x时期大约只有22%,到OpenCV 5提升到80%以上。
这个数字背后,解决的是很多开发者过去最熟悉的痛点:模型导出成ONNX后,OpenCV DNN不一定能顺利读;即便能读,也可能因为动态shape、控制流、量化图或某些Transformer结构而失败。OpenCV 5的新DNN引擎不再把网络简单看成一层一层顺序执行的列表,而是重建为带类型信息的计算图。这样一来,系统可以做形状推理、常量折叠、算子融合和更激进的内存复用。
新引擎开始支持过去很难处理的几类模型结构:带If和Loop的子图;符号shape和动态shape;用于量化模型的Quantize/Dequantize图;以及Transformer里常见的Attention和MatMul融合。
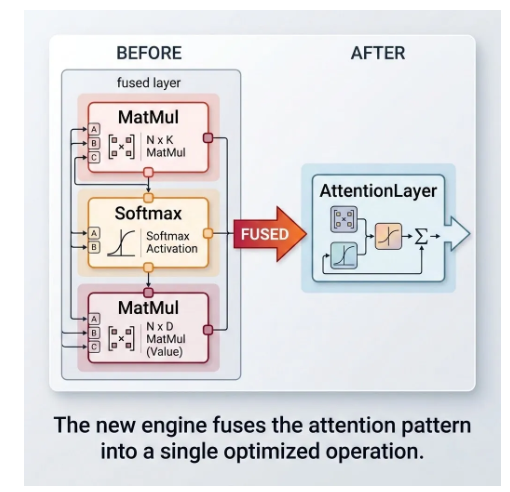
其中Attention融合很关键。引擎可以识别Transformer中典型的“MatMul - Softmax - MatMul”模式,并把它折叠成一个融合后的Attention操作,底层采用类似FlashAttention的实现思路。对开发者而言,使用方式没有变:加载模型,运行推理,性能提升由引擎自动完成。
三个引擎,一套API
大版本重写最容易让人担心兼容性。OpenCV 5的处理方式比较稳妥:在同一套DNN API背后保留多个引擎,开发者可以在读取模型时指定使用哪一个。
主要选项包括:ENGINE_CLASSIC,强制使用4.x风格的经典引擎,也是当前支持CUDA、OpenVINO等非CPU后端和target的路径;ENGINE_NEW,强制使用新的图引擎,支持融合和动态shape,但目前只跑CPU;ENGINE_AUTO,默认选项,先尝试新引擎,失败时回退到经典引擎;ENGINE_ORT,使用内置的ONNX Runtime封装,仅适用于ONNX模型,并且编译时需要启用WITH_ONNXRUNTIME。
这意味着,大部分已有代码不必大改。你仍然可以像以前一样调用readNetFromONNX;默认情况下,OpenCV会优先尝试新引擎,必要时自动回退。如果你要明确指定引擎,也可以在加载模型时传入engine参数。
# Python版本import cv2 as cv# 默认行为:ENGINE_AUTO,优先尝试新引擎,失败后回退到经典引擎net = cv.dnn.readNetFromONNX("model.onnx")# 也可以显式指定新图引擎net = cv.dnn.readNetFromONNX("model.onnx", engine=cv.dnn.ENGINE_NEW)net.setInput(blob)out = net.forward()
// C++版本#include <opencv2/dnn.hpp>using namespace cv;// Default behaviour (ENGINE_AUTO).dnn::Net net = dnn::readNetFromONNX("model.onnx");// Or pin a specific engine at load time./*dnn::Net netNew = dnn::readNetFromONNX("model.onnx", dnn::ENGINE_NEW);*/net.setInput(blob);Mat out = net.forward();
速度如何:在CPU上对标ONNX Runtime
盖率只是第一步,真正到工程里还要看速度。官方测试在Intel Core i9-14900KS和Ubuntu 24.04 LTS上比较了OpenCV 5 DNN与ONNX Runtime在多个真实模型上的CPU推理延迟。结果显示,在若干模型上,OpenCV 5的新DNN引擎不仅能跑,而且有竞争力,很多情况下还更快。
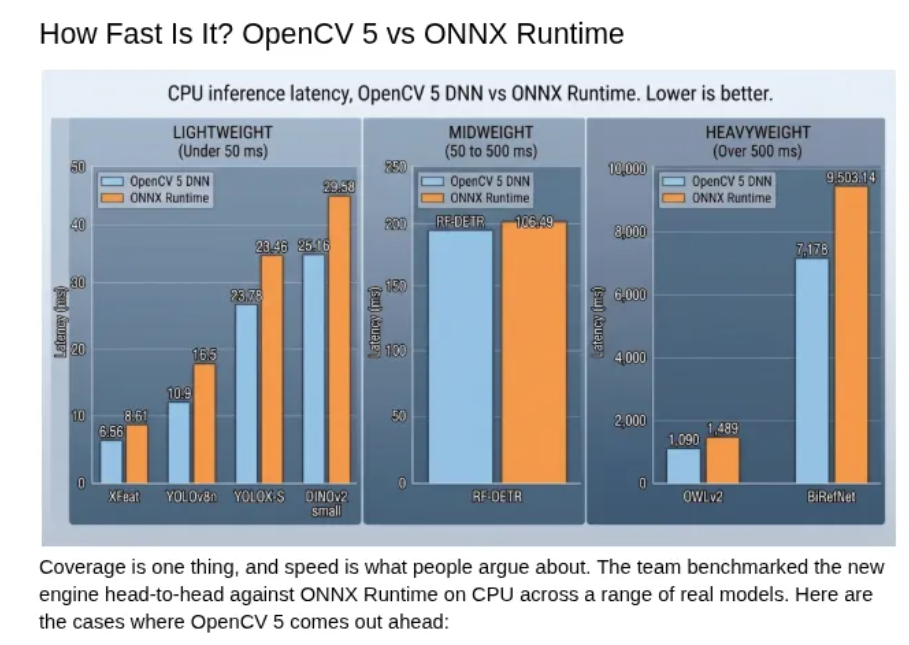
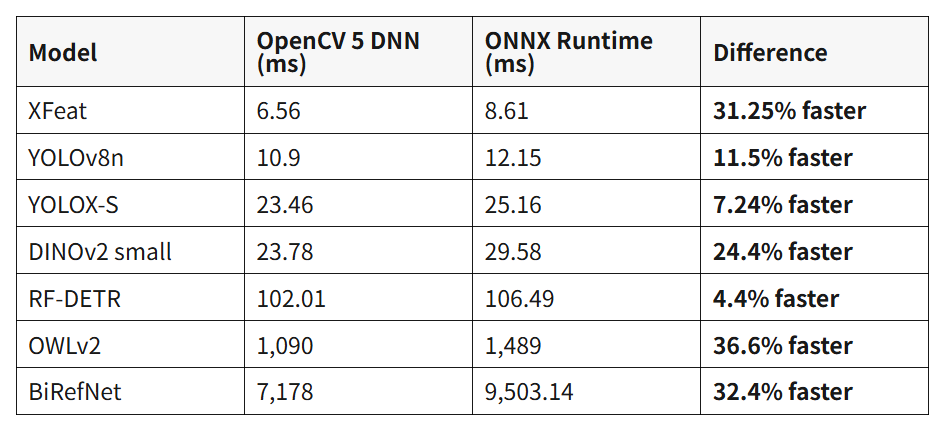
例如,XFeat上OpenCV 5为6.56毫秒,ONNX Runtime为8.61毫秒;YOLOv8n上分别为10.9毫秒和12.15毫秒;DINOv2 small上分别为23.78毫秒和29.58毫秒;OWLv2上分别为1090毫秒和1489毫秒。数值越低越好。
当然,这些结果不能简单理解为OpenCV 5在所有场景都一定快于ONNX Runtime。更准确的理解是:OpenCV 5的新DNN引擎已经不再只是“能不能加载模型”的补充选项,而是在CPU推理上有了正面竞争的能力。对于希望减少依赖、把视觉流程尽量留在OpenCV内部的项目,这一点很有价值。

更多模型可以开箱即用
ONNX覆盖率提升以后,最直接的好处就是更多现代模型可以直接跑。OpenCV 5已经针对一批覆盖检测、分割、特征骨干网络和生成式模型的现代模型进行了验证。
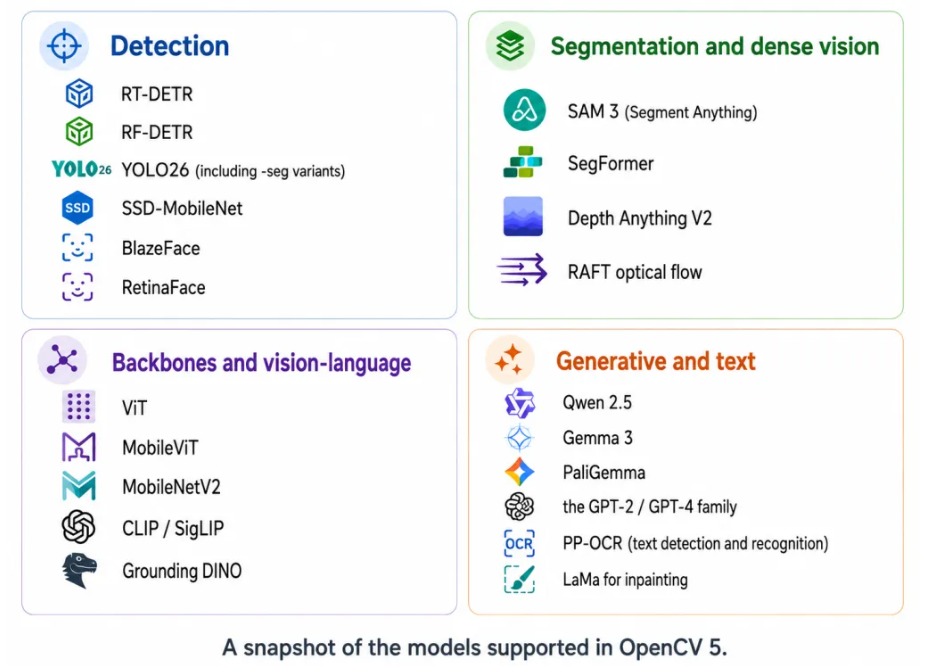
这对工程项目很实际。过去一个视觉系统里可能同时依赖OpenCV、ONNX Runtime、某个检测框架、某个分割框架,再加上一堆前后处理代码。OpenCV 5的目标不是替代所有深度学习框架,而是让更多常见视觉模型能在同一个库里完成部署,降低依赖复杂度。
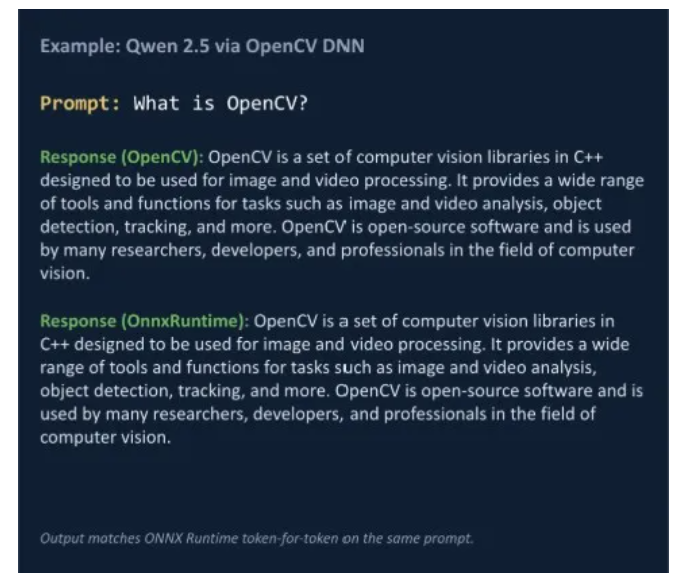
LLM和VLM也进入了OpenCV
OpenCV 5里一个很有意思的变化,是DNN模块可以直接运行大语言模型和视觉语言模型,不再必须依赖单独的推理运行时。
为了做到这一点,OpenCV 5加入了两个过去传统CV库不太需要的组件:内置tokenizer,以及用于自回归解码的KV-cache。前者负责把文本转成模型需要的token,后者让模型逐token生成时保持效率。官方文章提到,相关能力覆盖Qwen 2.5、Gemma 3、PaliGemma以及GPT-2/GPT-4家族,并且仍然通过开发者熟悉的Net API调用。
需要强调的是,OpenCV并不是要变成专门的LLM服务框架。它更适合在视觉流程中调用小型语言模型或视觉语言模型,比如图像描述、OCR后处理、开放词表查询,或者在一个视觉系统内部完成简单的图文理解。对于这类任务,少引入一个运行时,往往就少一层部署负担。
LaMa图像修复:一个forward完成物体移除
OpenCV 5还展示了基于LaMa的图像修复能力。输入一张图,再给出要移除区域的mask,DNN引擎就可以在一次forward中完成修复,把被遮挡区域补回来,并让边缘自然融合。
流程很直接:准备原图;准备mask;调用一次Net::forward;得到干净输出。官方还在OpenCV 5.x分支里提供了可运行的samples/dnn/inpainting.py。如果希望进一步尝试扩散模型版本,也可以看samples/dnn/ldm_inpainting.py。

实现上图功能的代码只有如下5行:
import cv2 as cvnet = cv.dnn.readNetFromONNX("lama.onnx")blob = cv.dnn.blobFromImages([img, mask], scalefactor=1/255.)net.setInput(blob)out = net.forward() # inpainted imag
这类能力说明OpenCV 5的DNN模块已经覆盖到更广的现代视觉任务,不再只是传统意义上的分类、检测和分割。
特征匹配也进入深度学习时代
特征检测和匹配是OpenCV最经典的任务之一。图像拼接、图像对齐、三维重建,很多系统都从SIFT、ORB、FAST这些传统特征开始。OpenCV 5保留了这些经典方法,同时把现代学习式特征匹配作为一等公民引入。
新的Features模块替代原来的Features2D,加入了完整的神经网络式检测、描述和匹配流程。
cv::ALIKED是基于CNN的关键点检测与描述方法,可以像SIFT或ORB一样嵌入已有调用位置;
cv::DISK是通过强化学习训练出来的学习式特征,在宽基线和低纹理场景中更有优势;
cv::LightGlueMatcher则是基于Attention的匹配器,可以输出带置信度的匹配结果,并能接入图像拼接模块。
这不是“新方法替代旧方法”,而是让开发者有了更灵活的选择:简单场景继续用稳定、轻量的传统特征;困难场景则可以直接尝试学习式特征和LightGlue匹配。
核心库更快,也更现代
OpenCV 5并不只是在DNN上做文章。底层core模块也做了很多会影响日常开发体验的改动。
首先是数据类型。OpenCV 5加入了原生FP16,也就是cv::hfloat和CV_16F,还加入了BF16,也就是cv::bfloat和CV_16BF,同时补齐了bool、64位整数等类型。现代AI工作负载大量使用这些数据类型,原生支持意味着少做很多来回转换。
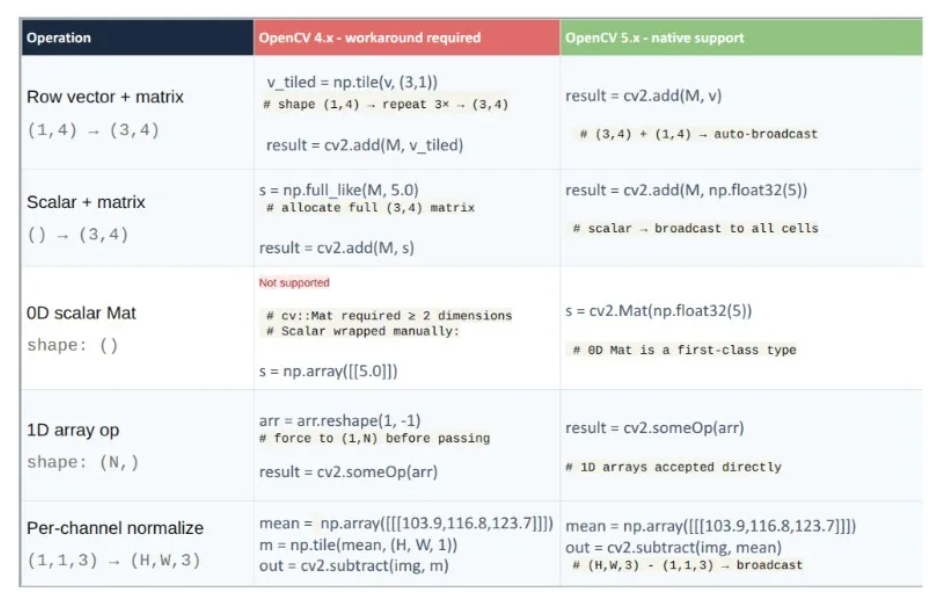
其次是更完整的N维数组和标量支持。过去cv::Mat至少需要二维,这在处理标量、1D数组以及很多模型中间结果时并不自然。OpenCV 5的cv::Mat可以表示0D标量和1D数组,并加入broadcasting,以及transposeND、flipND等N维操作。很多过去需要手工reshape、扩维、挤维的代码,可以变得更直接。
语言层面也更清爽:历史包袱很重的C API正式进入弃用状态;C++17成为最低推荐标准,后续5.x还计划引入C++20 modules;Python侧支持NumPy 2.x,并且让C++算法在Python里更好地支持命名参数。也就是说,过去必须记住一串位置参数的调用,现在可以写成cv.someAlgorithm(threshold=0.5)这种更直观的形式。
硬件加速:让同一套代码跑在更多芯片上
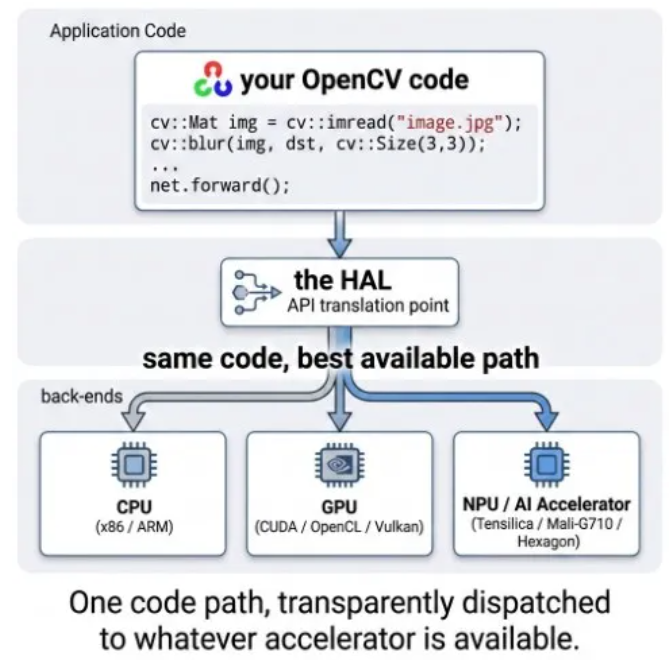
OpenCV 5里还有一个不那么显眼、但非常关键的变化:重新设计了Hardware Acceleration Layer,也就是HAL。
过去支持不同硬件,常常意味着大量条件编译、重复实现和分散在各处的优化代码。OpenCV 5希望把这件事收敛到一套干净的HAL契约里:硬件厂商可以为自己的芯片接入优化kernel,OpenCV在可用时自动调用,开发者的上层代码不用改。
目前已经接入或推进的路径包括:Intel IPP/IPPICV,这是OpenCV早期就很重要的x86/x64加速路径;Arm KleidiCV,面向AArch64,使用NEON、SVE和SME加速核心图像处理与DNN kernel;Qualcomm FastCV,面向Snapdragon等移动平台,可通过Hexagon DSP和NPU加速;RISC-V Vector,也就是RVV,相关工作主要由OpenCV China推动。
底层还有Universal Intrinsics 2.0,用一套向量化代码映射到SSE、AVX2/512、NEON、SVE、RVV等不同指令集。对开发者来说,理想状态很简单:写一次OpenCV代码,落到不同硬件上时尽量自动走最优路径。
3D视觉模块重新整理
OpenCV的3D能力这些年一直在增长,但旧的calib3d模块已经越来越像一个“大抽屉”。OpenCV 5把相关能力拆成三个更清晰的模块:3d、calib和stereo。
3d模块负责基础3D几何与视觉能力,包括I/O、几何基本元素、ICP等算法,以及部分SLAM相关能力;calib模块负责相机标定,包括单相机标定和重构后的多相机标定流程;stereo模块负责双目深度。
更值得注意的功能包括:通过calibrateMultiview进行多相机标定,也就是N相机bundle adjustment;通过registerCameras做相机间外参注册,并支持手眼标定、机器人世界标定等机器人场景;通过loadPointCloud、savePointCloud、loadMesh、saveMesh读写点云和网格,支持OBJ、PLY;通过TSDF、HashTSDF和ColorTSDF完成稠密RGB-D融合,并加入视觉里程计;此外还有包含MAGSAC的现代USAC框架,以及RANSAC平面和球体拟合。
如果你的工作涉及SfM、机器人、三维重建或RGB-D融合,这次调整不是简单改名,而是一次实用的能力升级。
文档终于更好用了
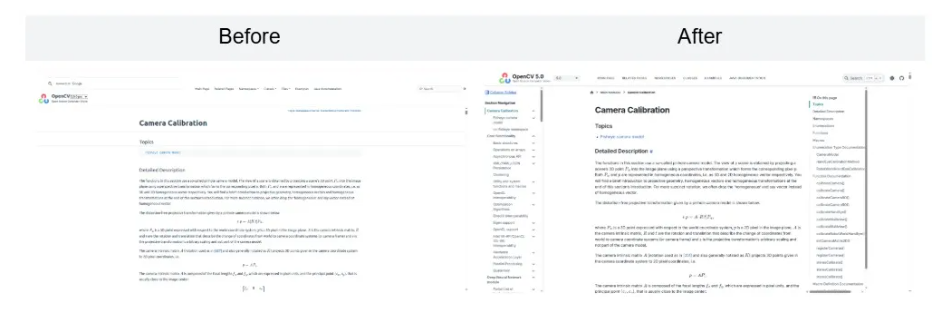
OpenCV 5的文档也重做了。新的文档系统从纯Doxygen转向Sphinx + Doxygen,带来了更现代的阅读体验:左侧导航常驻,手写教程和自动生成的API参考放在一起,Python签名可以和C++一起展示,提交前还有链接检查,整体样式也更清爽。
这类变化听起来不如DNN引擎重写那么“硬核”,但对日常开发非常重要。很多人学习OpenCV、查函数签名、找样例代码,首先接触的就是文档。文档少一点阻力,库本身就更容易被用起来。
OpenCV 5.0到底带来了什么
要点:ONNX算子覆盖率从4.x时期的大约22%提升到80%以上;DNN引擎重写为图引擎,支持融合、动态shape和统一buffer pool;可以通过ENGINE_ORT接入ONNX Runtime;LLM/VLM支持进入DNN模块,内置tokenizer和KV-cache;动态shape ONNX由新的形状推理引擎原生支持;cv::Mat支持0D标量和1D数组;数据类型补齐FP16、BF16、bool、64位整数等。
这些变化合在一起,说明OpenCV 5不是简单增加几个函数,而是在补现代视觉应用所需要的底层能力。
下一步:GPU版DNN引擎,以及非CPU HAL
OpenCV 5.0是一次大更新,但更像是一个新架构的起点。接下来最值得关注的,是两条路线。
第一条是新DNN引擎的原生GPU支持。当前官方展示的DNN benchmark主要在CPU上运行,新图引擎也是CPU优先。如果现在要GPU推理,可以使用ONNX Runtime后端以及CUDA、TensorRT等execution provider。OpenCV后续希望把GPU加速带入自己的原生图引擎,让开发者仍然通过同一个Net API拿到GPU速度,而不是必须额外引入独立运行时。
第二条是非CPU HAL,用于加速前处理和后处理。真实视觉流水线里,模型推理往往只是其中一部分。每一次forward前后都有resize、颜色转换、归一化、letterbox、NMS、mask resize、结果绘制等步骤。今天很多系统是CPU做前后处理,加速器做推理,数据在CPU和GPU/NPU之间来回搬。很多时候,真正的瓶颈不是模型,而是这些搬运。
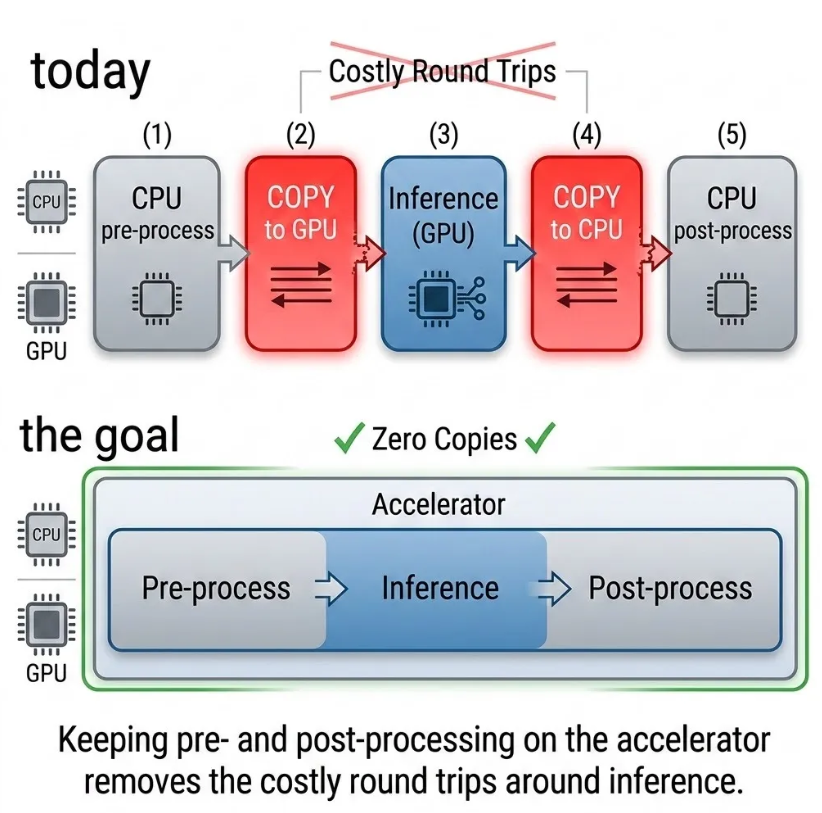
非CPU HAL的目标,是让常见imgproc函数也能跑在GPU、NPU或其他加速器上。理想流程是:帧保留在加速器上,resize和normalize在上面做,推理在上面做,后处理也在上面
结语
OpenCV 5的意义,不在于多了几个新函数,而在于它把OpenCV带回了现代计算机视觉开发的主战场。全新的DNN引擎解决了最常见的模型部署痛点,核心库和Python接口减少了日常摩擦,HAL为异构硬件打开了更干净的加速路径,3D视觉和特征匹配也补上了近年来的发展。
更重要的是,OpenCV 5没有抛弃庞大的既有用户。经典引擎还在,传统特征还在,已有API尽量保持不变。它一边激进现代化,一边保留兼容性。对这样一个被广泛嵌入科研、教学和工程系统的基础库来说,这种克制很重要。
如果说OpenCV过去二十多年是计算机视觉应用的“基础水电”,那么OpenCV 5就是一次面向AI时代的管线改造。它不会让所有问题一夜之间消失,但它让很多过去绕不开的麻烦,终于有了更干净的解决路径。

微信关注我们
转载内容版权归作者及来源网站所有!
低调大师中文资讯倾力打造互联网数据资讯、行业资源、电子商务、移动互联网、网络营销平台。持续更新报道IT业界、互联网、市场资讯、驱动更新,是最及时权威的产业资讯及硬件资讯报道平台。
马里奥是站在游戏界顶峰的超人气多面角色。马里奥靠吃蘑菇成长,特征是大鼻子、头戴帽子、身穿背带裤,还留着胡子。与他的双胞胎兄弟路易基一起,长年担任任天堂的招牌角色。
为解决软件依赖安装时官方源访问速度慢的问题,腾讯云为一些软件搭建了缓存服务。您可以通过使用腾讯云软件源站来提升依赖包的安装速度。为了方便用户自由搭建服务架构,目前腾讯云软件源站支持公网访问和内网访问。
Sublime Text具有漂亮的用户界面和强大的功能,例如代码缩略图,Python的插件,代码段等。还可自定义键绑定,菜单和工具栏。Sublime Text 的主要功能包括:拼写检查,书签,完整的 Python API , Goto 功能,即时项目切换,多选择,多窗口等等。Sublime Text 是一个跨平台的编辑器,同时支持Windows、Linux、Mac OS X等操作系统。
WebStorm 是jetbrains公司旗下一款JavaScript 开发工具。目前已经被广大中国JS开发者誉为“Web前端开发神器”、“最强大的HTML5编辑器”、“最智能的JavaScript IDE”等。与IntelliJ IDEA同源,继承了IntelliJ IDEA强大的JS部分的功能。
扫码在手机上查看文章
扫描二维码,手机阅读更方便
有任何问题或合作意向欢迎联系我们
Email: 99873273@qq.com
QQ: 99873273