运动控制能力作为决定环境适应性与任务执行能力的核心技术,是人形机器人从实验室迈向规模化应用最重要的门槛之一。7月7日,北京人形机器人创新中心(后称北京人形)正式发布开源运动控制框架Tien Kung-Lab,将机器人马拉松冠军的运控算法面向行业开源,填补高性能人形机器人运动控制框架在开源领域的空白,为工业场景、物流场景与特种作业场景等高复杂环境下规模化应用提供核心基础技术支撑。
![]()
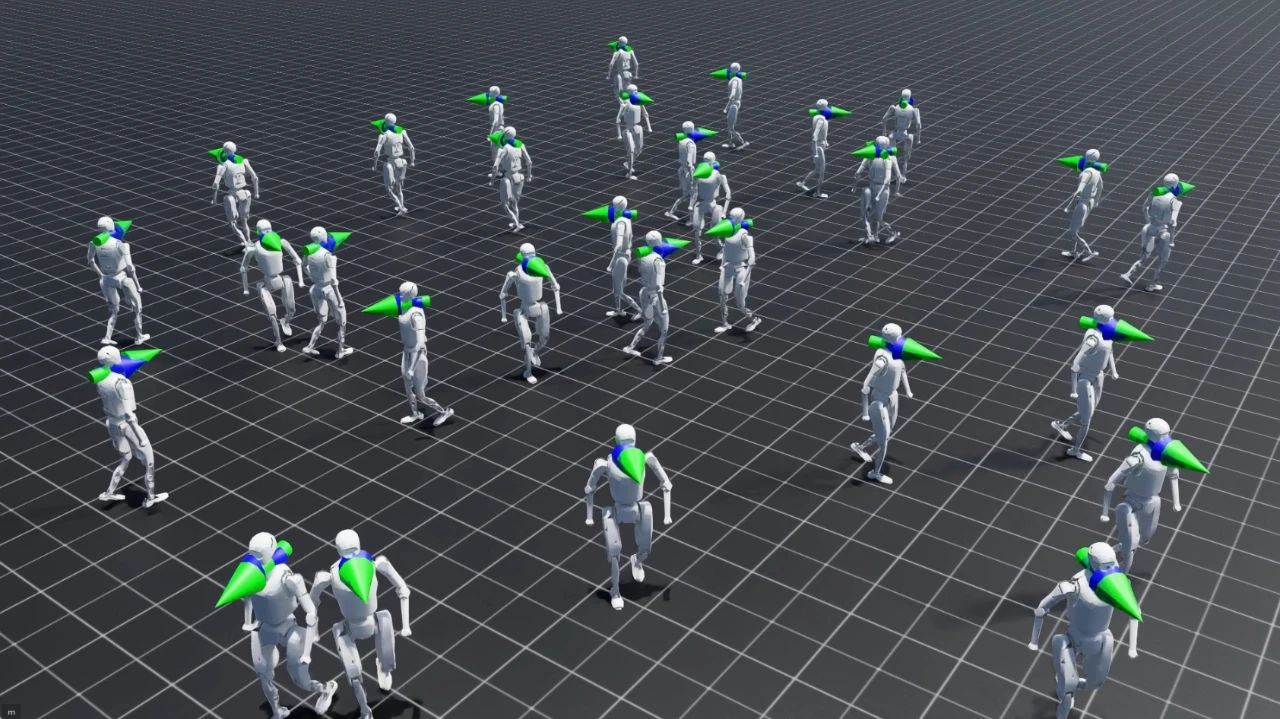
Tien Kung-Lab是一套基于Isaaclab开发的开源强化学习运动控制算法框架,该框架融合前沿的强化学习技术和人体运动数据,旨在让人形机器人实现自然、高效、稳定的运动控制。在此前进行的全球首届人形机器人马拉松比赛中,搭载该运控算法的天工Ultra以2时40分42秒跑完21.0975公里,夺得全球首个人形机器人马拉松冠军。
该方法首次融合了模仿学习与强化学习的优势,基于Adversarial Motion Prior(AMP)风格化奖励机制,通过引入动作捕捉数据作为先验,让人形机器人在走路、跑步等移动中具备面对复杂地形的高稳定性和高泛化性的同时,还保留了与人类高度相似的优雅姿态。Tien Kung-Lab所开源的针对人形机器人的步态奖励,可让开发者快速地训练出走路,跑步等策略。
![]()
为了帮助开发者更方便的进行感知策略训练,此次开源的算法框架,改进了相关的光线追踪技术,实现了训练环境中深度图和激光雷达点云的快速准确获取,让仿真环境下从感知到运动的端到端训练成为可能。同时,Tien Kung-Lab支持在高保真物理引擎MuJoCo进行Sim2Sim交叉验证,可实现从训练到交叉验证的无缝迁移。
![]()
当前,Tien Kung-Lab已在天工2.0全尺寸人形机器人上实现了具备高泛化性能的行走与奔跑,并在Open X-Humanoid开源社区、Github、Gitee等平台开放下载,加速全球人形机器人运动控制算法的研发迭代与生态构建。
如同人类需要稳健行走才能劳动,强大的运动控制能力是人形机器人执行各类产业任务的基础前提。基于Tien Kung-Lab,开发者可以快速让人形机器人具备面对复杂地形的泛化移动能力和快速移动能力,从而加快研发速度。
在北京亦庄举办的全球首届人形机器人马拉松比赛中,Tien Kung-Lab经历了超长赛程和真实路况的挑战,在运动控制层面保证了天工Ultra每一次迈步与落地的稳定、准确,跨越了真实道路中凸起、凹陷、减速带、细小石子等随机干扰,最终实现了顺利完赛。
![]()
早在2024年4月发布的天工1.0 lite上,北京人形就实现了多个运控技术的突破。天工1.0 lite是全球首个全尺寸纯电驱实现拟人奔跑的人形机器人,且能在斜坡、楼梯、草地、碎石、沙地等多种地形平稳移动。
在2024年11月的中关村仿生机器人大赛中,北京人形获得了竞速赛、障碍赛等多项冠军,并因此斩获全能优胜奖。比赛现场,天工Ultra作为唯一以奔跑的方式完成比赛的全尺寸人形机器人,以15秒66的奔跑成绩获得冠军;在障碍赛中,天工快速平稳地通过台阶、鹅卵石、碎砖瓦、沙地、坡道等多种地形,并跑步完成绕桩任务,以全场完成度最高获得冠军;在考察机器人上下肢协同与移动操作能力的作业赛中,“天工”是唯一完成作业赛的足式人形机器人,并凭借灵巧的任务执行能力获得亚军。
在一年的时间内,北京人形持续进化迭代运控算法,为天工实现了多次能力进化。2025年2月,天工实现了基于视觉的感知行走,完成了全球首例百级台阶攀登实验,实现了无磕碰、不踩棱、不踏空地跨越连续多级楼梯和35厘米大高差台阶。
同时,天工的奔跑时速也由6km/h提高至12km/h,并能在雪地等高难度地形完成高速奔跑。在抗干扰能力方面,天工可在大外力冲击下仍保持平衡。一系列进化,真正发挥出双足结构为人形机器人带来的多地形通用性优势,在实现全地形场景技术闭环的同时,为行业确立了复杂环境移动能力的全新标杆。
基于北京人形在运控领域的技术积累,Tien Kung-Lab的开源将极大缩短人形机器人产品实现跨地形高速泛化移动的时间。为人形机器人走出实验室,在真实环境执行任务,甚至在山地、雪地救援、废墟等极端环境下作业奠定基础,并为具身智能的规模化应用夯实技术底座。
未来,北京人形将以马拉松冠军级运动控制为基石,向“小脑级智能”的更高维度进发,攻坚基于学习方法的通用移动操作和全身复杂动作控制技术,并突破复杂动态环境中的全向感知和自主导航技术,迈出从“卓越单点运动执行”向“全身协同自主执行”的关键一步,实现“全能动作”与非结构化环境中的闭环自主作业能力。
在运动控制领域的持续突破,将为人形机器人构建强大的“运动智能中枢”,使其真正具备在真实、开放世界(如复杂工厂、灾难现场、户外场景)中自主移动、稳定操作、可靠完成任务的运动执行智能,为智能制造、特种作业、商业服务等实体产业的智能化升级奠定坚实的执行层基础。
代码地址:
- GitHub:https://github.com/Open-X-Humanoid/TienKung-Lab
- Gitee:https://gitee.com/open_x_humanoid/TienKung-Lab