https://my.oschina.net/u/1760791/blog/1587996
在使用assembly来打包springboot微服务项目前,我想说一说,目前springboot项目的几种常见的部署方式。
使用docker容器去部署,将springboot的应用构建成一个docker image,然后通过容器去启动镜像 ,这种方式在需要部署大规模的应用和应用扩展时是非常方便的,属于目前工业级的部署方案,但是需要掌握docker的生态圈技术。
-
使用fatjar直接部署启动,这是很多初学者或者极小规模情况下的一个简单应用部署方式。
本文主要针对第二种部署方式提供一种更加友好的打包方案,是部署管理更加轻松,第一种方式可能未来我会在自己博客中写。
一、为什么要将springboot服务化打包 ?
最近我看到一个项目团队,他们在采用springboot开发完项目构建交互给运维团队就是一个spring boot 的fatjar。而且这种原始打出的包在传统型项目开发公司,对于运维人员来说无疑是很致命的,项目交付后整个配置文件都被隐藏到打成的jar中,针对不同的环境修改配置文件就变成了一件很困难的事情。因此,我们在公司引入任何新技术时,一定要考虑怎么去做服务化和工程化,如果仅仅引用技术框架,很多时候可能只需要加入几个依赖,看下api写几行代码就能跑起来。
针对上面的这种问题,要去做服务化和工程化,大致要解决两点问题:
- 让springboot能够加载jar外的配置文件。
- 提供一个服务化的启动脚本,这个脚本一般是shell或者windows下的bat ,有了springboot的应用服务脚本后,就可以很容易的去启动和停止springboot的应用了。
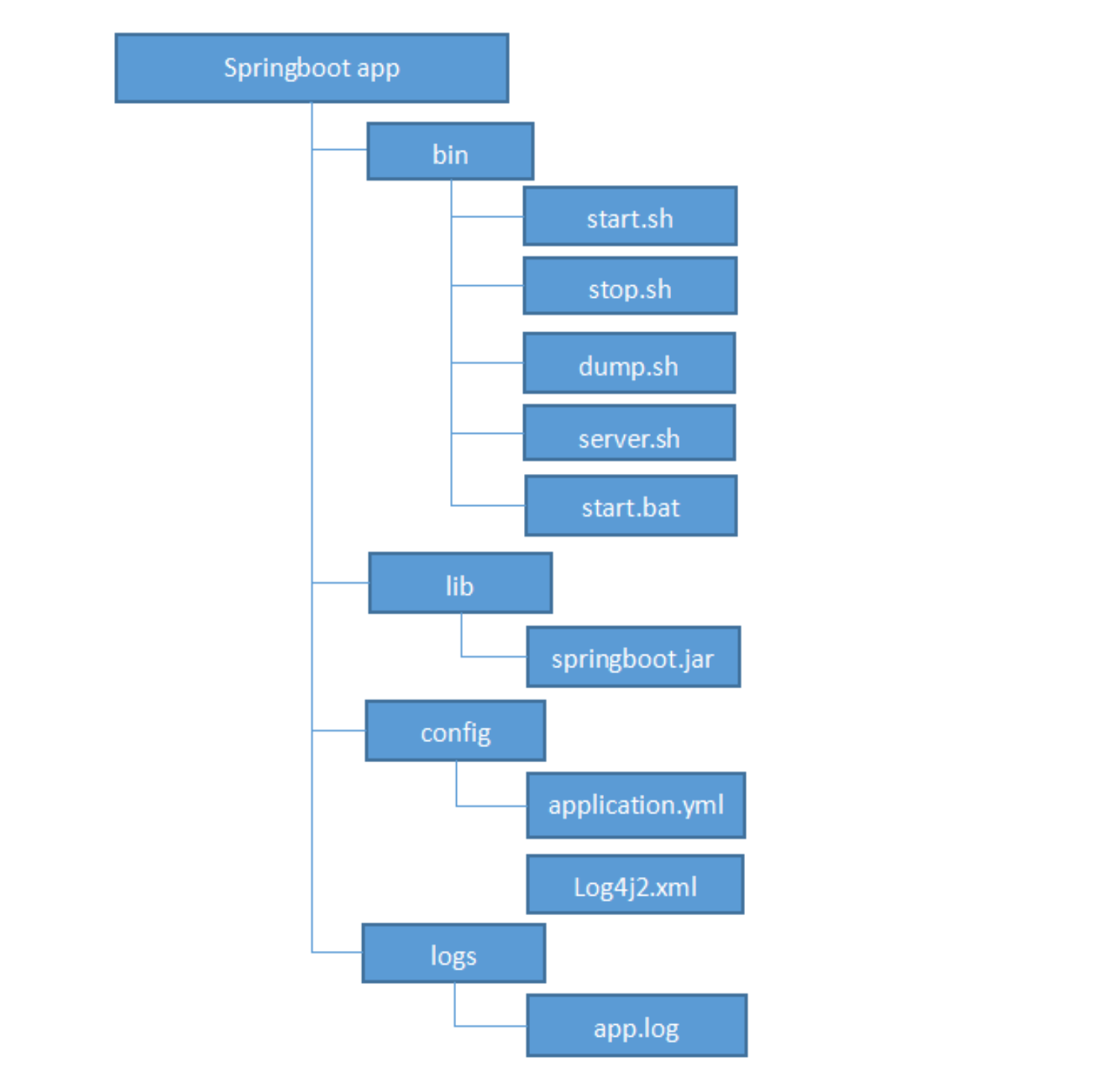
二、打包后的springboot应用结构图
这里先来看下使用assembly将springboot服务化打包后的效果图。
三、服务化打包重要步骤
下面是打包springboot的详细步骤。
3.1 加入assembly打包插件
<plugin>
<artifactId>maven-assembly-plugin</artifactId>
<version>3.0.0</version>
<configuration>
<descriptors>
<descriptor>src/main/assembly/assembly.xml</descriptor>
</descriptors>
</configuration>
<executions>
<execution>
<id>make-assembly</id>
<phase>package</phase>
<goals>
<goal>single</goal>
</goals>
</execution>
</executions>
</plugin>
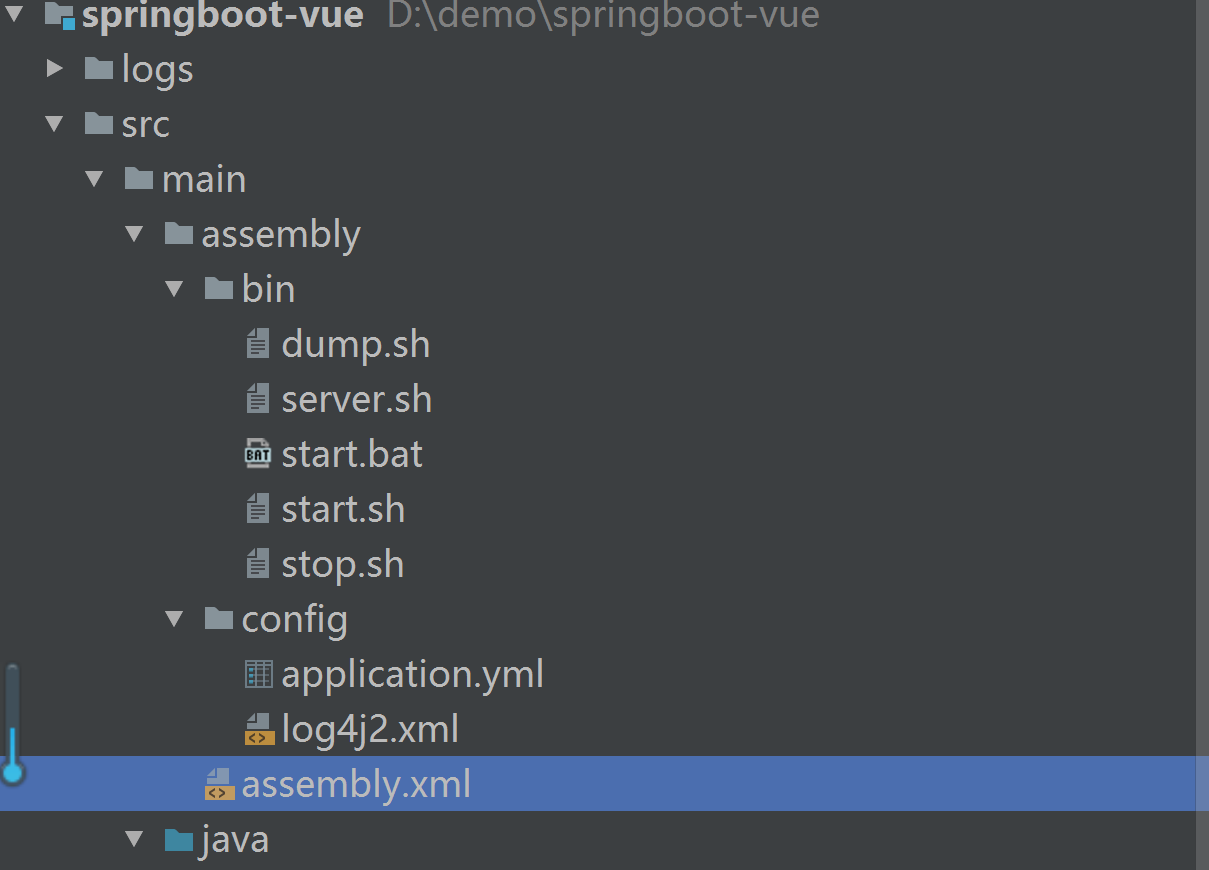
从上面代码看出了我把assembly的配置放在main目录下,这个是习惯,可以不放这里也可以,下面就是一个assembly在项目中的大致结构图:
3.2 assembly.xml配置
assembly的配置不同的应用和下面配置也差不多,无非就是打包服务脚本、jar、配置文件等。从下面的代码中config配置就会发现, assembly将配置文件打到了config下。
<assembly>
<id>1.0</id>
<formats>
<format>tar.gz</format>
</formats>
<fileSets>
<fileSet>
<directory>src/main/assembly/bin</directory>
<outputDirectory>bin</outputDirectory>
<fileMode>0755</fileMode>
</fileSet>
<fileSet>
<directory>src/main/assembly/config</directory>
<outputDirectory>config</outputDirectory>
<fileMode>0644</fileMode>
</fileSet>
<fileSet>
<directory>target</directory>
<outputDirectory>lib</outputDirectory>
<includes>
<include>*.jar</include>
</includes>
</fileSet>
<fileSet>
<directory>src/main/resources</directory>
<outputDirectory>logs</outputDirectory>
<fileMode>0755</fileMode>
<excludes>
<exclude>**/*</exclude>
</excludes>
</fileSet>
</fileSets>
</assembly>
3.3 编写服务脚本
现在写linux环境的脚本。
第一个:start.sh启动脚本
#!/bin/bash
SERVER_NAME='spring-vue'
# jar名称
JAR_NAME='springboot-vue.jar'
cd `dirname $0`
BIN_DIR=`pwd`
cd ..
DEPLOY_DIR=`pwd`
CONF_DIR=$DEPLOY_DIR/config
# SERVER_PORT=`sed '/server.port/!d;s/.*=//' config/application.properties | tr -d '\r'`
# 获取应用的端口号
SERVER_PORT=`sed -nr '/port: [0-9]+/ s/.*port: +([0-9]+).*/\1/p' config/application.yml`
PIDS=`ps -f | grep java | grep "$CONF_DIR" |awk '{print $2}'`
if [ "$1" = "status" ]; then
if [ -n "$PIDS" ]; then
echo "The $SERVER_NAME is running...!"
echo "PID: $PIDS"
exit 0
else
echo "The $SERVER_NAME is stopped"
exit 0
fi
fi
if [ -n "$PIDS" ]; then
echo "ERROR: The $SERVER_NAME already started!"
echo "PID: $PIDS"
exit 1
fi
if [ -n "$SERVER_PORT" ]; then
SERVER_PORT_COUNT=`netstat -tln | grep $SERVER_PORT | wc -l`
if [ $SERVER_PORT_COUNT -gt 0 ]; then
echo "ERROR: The $SERVER_NAME port $SERVER_PORT already used!"
exit 1
fi
fi
LOGS_DIR=$DEPLOY_DIR/logs
if [ ! -d $LOGS_DIR ]; then
mkdir $LOGS_DIR
fi
STDOUT_FILE=$LOGS_DIR/stdout.log
JAVA_OPTS=" -Djava.awt.headless=true -Djava.net.preferIPv4Stack=true "
JAVA_DEBUG_OPTS=""
if [ "$1" = "debug" ]; then
JAVA_DEBUG_OPTS=" -Xdebug -Xnoagent -Djava.compiler=NONE -Xrunjdwp:transport=dt_socket,address=8000,server=y,suspend=n "
fi
JAVA_JMX_OPTS=""
if [ "$1" = "jmx" ]; then
JAVA_JMX_OPTS=" -Dcom.sun.management.jmxremote.port=1099 -Dcom.sun.management.jmxremote.ssl=false -Dcom.sun.management.jmxremote.authenticate=false "
fi
JAVA_MEM_OPTS=""
BITS=`java -version 2>&1 | grep -i 64-bit`
if [ -n "$BITS" ]; then
JAVA_MEM_OPTS=" -server -Xmx512m -Xms512m -Xmn256m -XX:PermSize=128m -Xss256k -XX:+DisableExplicitGC -XX:+UseConcMarkSweepGC -XX:+CMSParallelRemarkEnabled -XX:+UseCMSCompactAtFullCollection -XX:LargePageSizeInBytes=128m -XX:+UseFastAccessorMethods -XX:+UseCMSInitiatingOccupancyOnly -XX:CMSInitiatingOccupancyFraction=70 "
else
JAVA_MEM_OPTS=" -server -Xms512m -Xmx512m -XX:PermSize=128m -XX:SurvivorRatio=2 -XX:+UseParallelGC "
fi
CONFIG_FILES=" -Dlogging.path=$LOGS_DIR -Dlogging.config=$CONF_DIR/log4j2.xml -Dspring.config.location=$CONF_DIR/application.properties "
echo -e "Starting the $SERVER_NAME ..."
nohup java $JAVA_OPTS $JAVA_MEM_OPTS $JAVA_DEBUG_OPTS $JAVA_JMX_OPTS $CONFIG_FILES -jar $DEPLOY_DIR/lib/$JAR_NAME > $STDOUT_FILE 2>&1 &
COUNT=0
while [ $COUNT -lt 1 ]; do
echo -e ".\c"
sleep 1
if [ -n "$SERVER_PORT" ]; then
COUNT=`netstat -an | grep $SERVER_PORT | wc -l`
else
COUNT=`ps -f | grep java | grep "$DEPLOY_DIR" | awk '{print $2}' | wc -l`
fi
if [ $COUNT -gt 0 ]; then
break
fi
done
echo "OK!"
PIDS=`ps -f | grep java | grep "$DEPLOY_DIR" | awk '{print $2}'`
echo "PID: $PIDS"
echo "STDOUT: $STDOUT_FILE"
脚本用例:
# 启动应用
./start.sh
# 以debug方式启动
./start debug
# 启动任务并开启jmx监控
./start jmx
# 获取当前的运行状态
./start status
停止脚本:stop.sh
#!/bin/bash
cd `dirname $0`
BIN_DIR=`pwd`
cd ..
DEPLOY_DIR=`pwd`
CONF_DIR=$DEPLOY_DIR/config
SERVER_NAME=$DEPLOY_DIR
PIDS=`ps -ef | grep java | grep "$CONF_DIR" |awk '{print $2}'`
if [ -z "$PIDS" ]; then
echo "ERROR: The $SERVER_NAME does not started!"
exit 1
fi
if [ "$1" != "skip" ]; then
$BIN_DIR/dump.sh
fi
echo -e "Stopping the $SERVER_NAME ...\c"
for PID in $PIDS ; do
kill $PID > /dev/null 2>&1
done
COUNT=0
while [ $COUNT -lt 1 ]; do
echo -e ".\c"
sleep 1
COUNT=1
for PID in $PIDS ; do
PID_EXIST=`ps -f -p $PID | grep java`
if [ -n "$PID_EXIST" ]; then
COUNT=0
break
fi
done
done
echo "OK!"
echo "PID: $PIDS"
windows环境的启动脚本:
echo off
set APP_NAME=springboot-vue.jar
set CONFIG= -Dlogging.path=../logs -Dlogging.config=../config/log4j2.xml -Dspring.config.location=../config/application.yml
set DEBUG_OPTS=
if ""%1"" == ""debug"" (
set DEBUG_OPTS= -Xloggc:../logs/gc.log -verbose:gc -XX:+PrintGCDetails -XX:+HeapDumpOnOutOfMemoryError -XX:HeapDumpPath=../logs
goto debug
)
set JMX_OPTS=
if ""%1"" == ""jmx"" (
set JMX_OPTS= -Dcom.sun.management.jmxremote -Dcom.sun.management.jmxremote.port=9888 -Dcom.sun.management.jmxremote.ssl=FALSE -Dcom.sun.management.jmxremote.authenticate=FALSE
goto jmx
)
echo "Starting the %APP_NAME%"
java -Xms512m -Xmx512m -server %DEBUG_OPTS% %JMX_OPTS% %CONFIG% -jar ../lib/%APP_NAME%
goto end
:debug
echo "debug"
java -Xms512m -Xmx512m -server %DEBUG_OPTS% %CONFIG% -jar ../lib/%APP_NAME%
goto end
:jmx
java -Xms512m -Xmx512m -server %JMX_OPTS% %CONFIG% -jar ../lib/%APP_NAME%
goto end
:end
pause
对于不同的springboot项目,只需要适当修改一下脚本就可以了,为了节约篇幅这里就不列出其他的脚本了,可以参考我提交的demo:https://github.com/Shalousun/springboot-vue.git,对于demo如有疑问可添加该群:170651381
ps:以上脚本参考自dubbo官方。其实对于dubbo项目的轻量化构建也是类似的
重点:上面讲了这么多脚本,其实每次创建项目添加一堆assembly的配置也是比较麻烦的,而且需要去修改脚本中的jar名称,修改的不一致还可能出错,因此可以采用本人开源的项目框架搭建脚手架https://gitee.com/sunyurepository/ApplicationPower来自动创建这些配置然后复制到您的项目中,您就只需要安安心心写写业务代码。
四、打包后应用的日志路径处理
在第二节的图中可以看到打包的应用日志一般统一输出到logs目录中,但是对于不同的系统平台,虽然配置的日志输出路径是一样的,但是最后不一定输出到logs中。经过测试在windows平台中使用相对的日志路径../logs是没有问题的,但是对于linux系统下使用相对路径就不能输出到logs下,因此建议在linux平台下就写绝对路径吧。不过在我提供的脚本中设置输出日志的路径
-Dlogging.path=../logs
因此结合log4j2的强大解析能力完全可以设置log42的日志路径(开发时则手动指定路径):
<property name="LOG_HOME">${sys:logging.path}</property>
但是对于springboot应用的访问日志在linux下似乎只能使用绝对路径了。
# server config
server:
port: 8080
undertow:
accesslog:
enabled: true
dir: /usr/xxx/logs
logging:
path: /usr/xxx/logs
当然后面有使用配置解决的同学可以提醒纠正下。
总结:这个方案本身并没有带来什么新东西,甚至脚本大多数是参考了dubbo官方的脚本,只是在上面做了些完善。但是重要的一点是怎么去根据实际的技术应用场景,思考使用这项技术需要做的服务化和工程化。